Тақырып бойынша студенттік зерттеу жұмысы (UNIRS):
«Лидар линзаларының айна схемалары»
Санкт-Петербург
Кіріспе
1. Лидар жұмыс істеу принципі
2. Лидар құрылғысы
3. Лидар линзаларының оптикалық конструкциялары
3.1 Ньютон линзасы
3.2 Кассегрен линзасы
3.3 Григорий линзасы
Қорытынды
Кіріспе
«Лидар» термині ағылшын тіліндегі жарықты анықтау, анықтау және диагностикалау (жарық көмегімен анықтау және диапазонды анықтау) сөзінің аббревиатурасы болып табылады.
Lidar – мөлдір және мөлдір ортада жарықтың шағылысу және шашырау құбылыстарын пайдаланатын белсенді оптикалық жүйелерді пайдалана отырып, алыстағы объектілер туралы ақпаратты алу және өңдеу технологиясы.
Құрылғы ретінде lidar ауа мен су ортасын қашықтықтан зондтау үшін оптикалық локатор болып табылады. Лидарлар сонымен қатар қатты заттар туралы ақпаратты қашықтан алуға мүмкіндік беретін оптикалық локаторларды қамтиды.
Лидарлар оларда қолданылатын лазерлердің артықшылықтарына байланысты сұранысқа ие және танымал:
Радиациялық когеренттілік
· Сәулеленудің қысқа толқын ұзындығы және соның салдары ретінде дивергенцияға байланысты аз шығындар
Лездік сәулелену қуаты
Осы қасиеттердің үйлесімі лидарды жүздеген метрден бірнеше шақырымға дейінгі қашықтықта пайдалануды қажет етеді.
1. Лидар жұмыс істеу принципі
Атмосфераға импульстік лазерлік сәуле жіберіледі. Содан кейін атмосфераның қарама-қарсы бағытта шашыраған сәулеленуі телескоппен жиналады және фотодетектормен жазылады, содан кейін сигналдарды цифрлау жүзеге асырылады.
импульстік lidar телефото линзасы оптикалық
Лидар секундына 150 000 импульсқа дейінгі жылдамдықпен объектіге (бетке) лазер сәулесінің жылдам, қысқа импульстерін шығарады. Құрылғыдағы сенсор импульстің қайтарылуына қажетті уақыт мөлшерін өлшейді. Жарық тұрақты және белгілі жылдамдықпен таралады, сондықтан лидар оны мен нысана арасындағы қашықтықты жоғары дәлдікпен есептей алады.
Импульстік лидарлардың екі негізгі категориясы бар: микроимпульстік және жоғары энергиялық жүйелер.
Микроимпульстік лидарлар үлкен есептеу мүмкіндіктері бар қуатты компьютерлік технологияда жұмыс істейді.
Бұл лазерлердің қуаттылығы төмен және «көзге қауіпсіз» ретінде жіктеледі, бұл оларды арнайы сақтық шараларын аз немесе мүлдем қолданбай пайдалануға мүмкіндік береді.
Жоғары импульстік энергия лидарлары негізінен атмосфералық зерттеулерде қолданылады, мұнда олар жиі бұлт биіктігі, қабаттар мен тығыздық, бұлт бөлшектерінің қасиеттері, температура, қысым, жел, ылғалдылық және атмосфералық газ концентрациясы сияқты әртүрлі атмосфералық параметрлерді өлшеу үшін қолданылады.
2 . Лидар құрылғысы
Лидарлардың көпшілігі үш бөліктен тұрады:
· Тарату бөлігі
· Қабылдау бөлігі
· Басқару жүйесі
Лидардың таратқыш бөлігінде (а) сәулелену көзі - лазер және шығыс лазер сәулесін қалыптастыруға арналған оптикалық жүйе, яғни. шығыс нүкте өлшемін және сәуленің дивергенциясын басқару үшін.
Конструкциялардың басым көпшілігінде эмитент лазер болып табылады, ол жоғары лездік қуаттағы жарықтың қысқа импульстарын жасайды. Импульстің қайталану жиілігі немесе модуляциялау жиілігі екі дәйекті импульс арасындағы үзіліс анықталатын нысаналардың жауап беру уақытынан кем болмайтындай етіп таңдалады (бұл құрылғының болжалды диапазонынан физикалық түрде алыс орналасуы мүмкін). Толқын ұзындығын таңдау лазердің функциясына және құрылғының қауіпсіздік және құпиялылық талаптарына байланысты; Ең жиі қолданылатын Nd:YAG лазерлері мен толқын ұзындығы:
1550 нм - бұл адам көзіне және әдеттегі түнгі көру құрылғыларына көрінбейтін инфрақызыл сәуле. Көз бұл толқындарды тордың бетіне шоғырландыра алмайды, сондықтан 1550 толқыны үшін жарақат шегі қысқа толқындарға қарағанда айтарлықтай жоғары. Дегенмен, көздің зақымдану қаупі көрінетін сәуле шығаратындарға қарағанда жоғарырақ - көз инфрақызыл сәулеленуге әсер етпейтіндіктен, адамның табиғи қорғаныс рефлексі де жұмыс істемейді.
1064 нм - көзге көрінбейтін, бірақ түнде көру құрылғыларымен анықталатын неодим және иттербий лазерлерінің жақын инфрақызыл сәулесі
532 нм - су массасын тиімді «тесетін» неодим лазерінің жасыл сәулесі
355 нм -- ультракүлгін сәулеленуге жақын
Қабылдаушы бөлік (б) линзадан (телескоп), спектрлік және/немесе кеңістіктік сүзгілерден, поляризациялық элементтен және фотодетектордан тұрады. Зерттелетін объектіден шағылған және шашыраған радиация оптика (телескоп) қабылдау арқылы шоғырланып, одан кейін спектр анализаторы арқылы өтеді. Бұл құрылғы бақылаулар жүргізілетін толқын ұзындығы диапазонын оқшаулауға, демек, басқа толқын ұзындықтарындағы фон сәулеленуін тоқтатуға қызмет етеді. Анализатор күрделі, мұқият бапталған моно- немесе полихроматор немесе лазер таратқышының толқын ұзындығындағы кескіш сүзгіні қоса алғанда, тар жолақты сүзгілер жиынтығы болуы мүмкін.
Эмитент пен қабылдау блогы бір-бірінен алшақ болуы мүмкін немесе соңғы жылдары кең таралған бір блокта жасалуы мүмкін. Эмитент пен қабылдағыштың осьтері біріктірілген (коаксиалды схема) немесе бөлінген (биаксиалды схема) болуы мүмкін.
Басқару жүйесі келесі міндеттерді орындайды:
* Лидар жұмыс режимін басқару;
* Лазерлік зондтық сәулелену жиілігін бақылау;
* Екі жиілікте шығыс және қабылданған қос жиілікті лазер сәулесіндегі сәулелену энергиясын өлшеу;
* Нәтижелерді өңдеу, яғни. атмосфераның спектрлік сипаттамаларын алу, компьютерлік деректер қорында бар молекулалардың «спектрлік портреттерін» пайдалана отырып, қоспалардың болуы мен концентрациясын анықтау;
* Зерттелетін объектіге лидарлық бағыттау жүйесін басқару.
Зерттеу барысында мен әртүрлі лидарларда қолданылатын линза конструкцияларын мұқият қарастыруды шештім.
3 . Лидар линзаларының оптикалық конструкциялары
Зерттелетін объектіден қайтарылатын сигналды лидар қабылдағыш линза ұстап, сүзгіден өткізіп (кеңістіктік және спектрлік) және фотодетектордың сезімтал аймағына бағытталуы керек. Мұның барлығы объектив жинайтын пайдалы жарық сигналын айтарлықтай жоғалтпай, сигналды шулы ететін барлық кедергілерді барынша басу арқылы максималды тиімділікпен жасалуы керек. Пайдалы сигналдың қабылдау жүйесі арқылы өтуін бақылап, осы жүйенің әрбір элементін жеке қарастырайық.
Лазер нысандағы нүктені жарықтандырады, оның өлшемі сәуленің 2 дивергенциясымен және R объектісіне дейінгі қашықтықпен анықталады: D=2Rtg2R. Шағылған және кері шашыраған сәулеленудің бір бөлігі линзамен жиналады, суретте көрсетілгендей: (лазер және қабылдау линзалары коаксиалды).
Линзаға түсетін нүктедегі нүктелерден тек сәулелердің экстремалды сәулелері ғана көрсетілген. Үлкен қашықтықта нүктеден түсетін сәулелер бір-біріне дерлік параллель болады. Линзаның мақсаты - дақтан жеткілікті жарық жинау және дақты фотодетекторға проекциялау. Демек, линзаның негізгі параметрлері жарық жинау аймағы, фокустық қашықтық және көру аймағы болып табылады. Ғарыштық лидарлар үшін атмосфераның немесе жердің зерттелген қабаттарына дейінгі қашықтық жүздеген километрге жеткенде, жеткілікті жарық жинау үшін диаметрі 1...3 м немесе одан да үлкен линзаларды пайдалану қажет, әсіресе Раманның шашырауы немесе дифференциалды жұтылу режимдерінде жұмыс істейді. Диаметрі d және фокус қашықтығы f" линзаның апертурасын анықтайды (салыстырмалы апертура d/f"). Жүйе неғұрлым жарқын болса, ол шығаратын кескін өлшемі соғұрлым аз болады. Линзаның көру өрісі нүктенің шеткі нүктесінің сәулесі линзаның кіреберіс қарашығының ортасынан өтетін бұрышпен анықталады (суретте). Кескін өлшемі (фотодетектордың өлшемінен артық емес), эквивалентті фокустық қашықтық (қабылдағыштың спектрлік блогындағы қосымша қайта жобалау элементтерін ескере отырып) және көру өрісінің бұрышы 2a = 2f қатынасымен байланысты. tg, бұл нақты тізбектердің параметрлерін таңдауға және қажетті элементтерді таңдауға мүмкіндік береді, көптеген жағдайларда дақ тікелей фотодетекторға емес, өрісті шектейтін өріс диафрагмасының жазықтығына (бастапқы кескін) проекцияланады. линзаның көрінісі, өріс диафрагмасының өлшемін реттеу арқылы фотодетекторға проекцияланған нүктенің тиімді өлшемін өзгертуге болады, басқаша айтқанда, ол өлшемдердің кеңістіктік ажыратымдылығын өзгертуге, сонымен қатар оны азайтуға мүмкіндік береді бірнеше шашыраңқы жарықтан бастапқы кескінді қайта проекциялау да объектив ішінде шашыраңқы жарықпен күресудің бір жолы болып табылады, егер өріс диафрагмасы максималды өлшемде болса, лазер мен лидардың қабылдау линзасы өзара реттеледі (максимумға дейін). қабылданған сигнал). Диафрагма әдетте ирис немесе әртүрлі диаметрлі тесіктері бар диск түрінде болады.
Лидар алыстағы объектілермен жұмыс істейтіндіктен, линза дерлік шексіздіктен соңғы қашықтыққа дейін (фокус жазықтығында) кескінді құруы керек. Анау. телефото линзалар қолданылады. Телефото объективінің оптикалық есебі кескіннің жиегінің аберрациялық бұлыңғырлығы ең аз немесе жарық жоғалту (өріс диафрагмасы бойынша виньет) тұрғысынан қолайлы болуы керек екенін ескере отырып жүзеге асырылады. Қашықтық өлшеуіштер, сканерлер, батиметрлер сияқты жүйелерде линзаның диаметрі кішкентай - 15-тен 150 мм-ге дейін. Сондықтан линзалар әдетте линза болып табылады.
Лидарларда қолданылатын линзалар:
· Айна (рефлекторлар) – жарық жинайтын элемент ретінде айнаны пайдаланыңыз.
· Айна-объектив (катадиоптриялық) – оптикалық элементтер ретінде айналар да, линзалар да қолданылады. Айта кету керек, линзалар өлшемдері бойынша негізгі айнамен салыстырылады және ол арқылы жасалған кескінді түзетуге қызмет етеді.
Айналарды жеңілдетуге болады, бұл авиация және әсіресе ғарыш жүйелері үшін маңызды. Айна жүйелері телескоптардың классикалық сұлбалары бойынша құрастырылған: Ньютон), Грегори және Кассегрейн. Бастапқы фокустан кейін объектив линзасы шартты түрде орналастырылады, бұл қабылдау жүйесінде кейбір қосымша оптиканың болуын білдіреді. Айна жүйелерінде әрқашан орталық экрандау болады, тіпті Ньютондық дизайнда қабылдағыш осьтегі фокус нүктесінде орналастырылған. Бірнеше доғалы секундтық кішігірім көру өрістері мен салыстырмалы саңылаулары (d/f» 1:10-дан аз) үшін Ньютон схемасындағы параболоидтың орнына шар қолданылады, бұл экономикалық себептерге байланысты. Кескін сапасы (тек энергия жинау керек) Кейде екіншілік гиперболалық айнаны сфералық түрге ауыстыруға болады, сондай-ақ бастапқы сфералық айнамен және екінші ретті асфералық айнамен ауыстыруға болады схемалар үлкен телескоптары бар ғарыштық лидарлар үшін пайдалы.
Лазер мен қабылдағыш телескоптың салыстырмалы орналасуының нұсқалары:
Бірінші схемада оптикалық осьтерді туралау үшін диагональды жалпақ айнаның артқы беті қолданылады. Екінші схемада қабылдағыш телескоп сонымен қатар оның сапасына қатаң талаптар қоюды талап ететін қалыптастырушы телескоп ретінде пайдаланылады (әйтпесе лазер сәулесі қатты алшақтайды). Сонымен қатар, сәулені бөлгішті пайдалану салдарынан сөзсіз жоғалтулар бар. Үшінші дизайн негізгі және диагональды (немесе қосымша) айналардағы тесіктерді пайдаланады. Орталық аймақтар әрқашан жұмыс істемейді. Лазер мен телескоптың осьтері тураланбаған – параллель немесе өзара көлбеу болатын схемалар да қолданылады. Мұндай схемалар лазер сәулесінің энергиясын барынша тиімді пайдалануға мүмкіндік бермейді, бірақ олар осьтегі жарық нүктеден (нөлге жуық көру өрісі) құтылуға мүмкіндік береді, бұл қабылдағыштың шамадан тыс қанығуын тудыруы мүмкін. Энергияны есептеу кезінде лазер сәулесіндегі Гаусс энергиясының таралуын ескеру қажет.
3.1 Ньютон линзасы
Бұл схеманы 1668 жылы Исаак Ньютон ойлап тапты. Мұнда негізгі (параболалық) айна сәулеленуді фокусқа жақын орналасқан шағын жазық диагональды айнаға бағыттайды. Ол, өз кезегінде, радиациялық сәулені құбырдың сыртына бұрады, онда ол қабылдау құрылғысына түседі.
Бұл схемада оптикалық элементтердің ең аз саны бар, бұл оңай реттеуге, айна өңдеуге төмен талаптарға және төмен өндірістік шығындарға мүмкіндік береді. Үлкен өлшеміне байланысты негізгі айна термиялық тұрақтандыру үшін уақытты қажет етеді. Ол сондай-ақ тасымалдау кезінде және жұмыс кезінде жоғалып кетуге бейім айналар мерзімді реттеуді талап етеді. Жүйе команың аберрациясынан бос емес.
Ньютон линзасы көптеген лидарларда қолданылады, олардың кейбірін қарастырайық:
1) Көп толқынды раман лидар MRL-400
Бұл лидардың жұмысы жарықтың Рамандық шашырауы (Раман эффектісі) құбылысына негізделген - сәулелену жиілігінің айтарлықтай өзгеруімен жүретін заттың (қатты, сұйық немесе газ тәрізді) молекулаларына оптикалық сәулеленудің серпімді емес шашырауы. Бастапқы (қоздырғыш) жарықтың спектрінде болмайтын шашыраңқы сәулелену спектрінде спектрлік сызықтар пайда болады. Пайда болатын сызықтардың саны мен орналасуы заттың молекулалық құрылымымен анықталады.
Лазерлік сәулелену осьтен тыс параболалық айна коллиматоры арқылы телескопталған. Лазер коллиматормен бірге қабылдағыш телескопқа орнатылады, бұл горизонтқа кез келген бұрышта өлшеуді жүргізуге мүмкіндік береді.
MRL-400 лидар құрылымы
Сәулелену көзі: үшінші гармоникалық генераторы бар Quantel Brilliant Nd:YAG лазері
Импульстік энергия: 300/300/200 мДж - 1064/532/355 нм
Қайталау жиілігі: 10 Гц
Үлкейту коэффициенті 5 осьтен тыс параболалық айна коллиматоры. Диэлектрлік айна жабындары 355, 532, 1064 нм толқын ұзындығында коллиматордың жұмысын қамтамасыз етеді.
Апертурасы 400 мм және фокус аралығы 1200 мм Ньютон телескопы.
2) Көп толқынды аэрозоль лидар ПЛ-200
PL-200 лидар құрылымы
Сәулелену көзі: үшінші гармоникалық генераторы бар Nd:YAG лазері.
355 нм кезіндегі энергия: 70 мДж
Қайталау жиілігі: 25 Гц
Сәулелік дивергенция:< 1 мрад
Коллиматор: Диэлектрлік жабындары және ұлғайту коэффициенті 5 болатын осьтен тыс параболалық коллиматор шығарылатын толқын ұзындығын (1064, 532, 355 нм) бір уақытта телескопиялауға арналған.
Лидар 300 мм апертурасы бар Ньютон телескопын пайдаланады. Негізгі айна 970 мм фокус аралығымен параболалық.
3.2 Кассегрен линзасы
Бұл схеманы 1672 жылы Лоран Кассегрейн ұсынған. Үлкенірек диаметрлі бастапқы айна (ойыс; бастапқы нұсқада параболалық) кіші диаметрлі (әдетте гиперболалық) екінші реттік дөңес айнаға сәулені көрсетеді. Қосалқы айна негізгі айна мен оның фокусы арасында орналасқан және линзаның жалпы фокустық қашықтығы бастапқыдан үлкенірек. Диаметрі және фокустық қашықтығы бірдей линзаның түтік ұзындығының жартысына жуығы және Григорийдікінен сәл аз экрандауы бар. Дәстүрлі Cassegrain рефлекторын жасау қиын (күрделі айна беттері - парабола, гипербола), сонымен қатар кома аберрациясы дұрыс түзетілмеген. Соңғы кемшілік Cassegrain схемасының әртүрлі модификацияларында түзетілді.
SLR линзаларының ішінде Cassegrain объективі оның жинақылығы мен ұзақ фокустық ұзындығының үйлесімі арқасында ең танымал болып табылады.
Кассегрен схемасы бойынша құрастырылған қабылдау телескопын пайдаланатын кейбір лидарларды қарастырайық:
1) МВЛ-60 стационарлық лидар кешені
MVL-60 көп толқынды лидар 1064 (IR), 532 (жасыл) және 355 (УК) нм толқын ұзындығында жұмыс істейтін лазерді пайдалана отырып, атмосфералық аэрозоль мен атмосферадағы бұлт түзілістерінің сипаттамаларын оперативті қашықтықтан талдауға арналған.
Лидар қабылдау антеннасы телескоп болып табылады, көбінесе айна болып табылады, әдетте Ньютон немесе Кассегрен схемасы бойынша құрастырылады. Бұл схемалардың екеуі де негізгі параболалық айна диаметрі 60 см болатын MVL-60 лидар телескопында жүзеге асырылады.
Телескопта лидар қабылдау антеннасы ретінде жұмыс істегенде, алынған шағылысқан лазерлік сигнал алдымен негізгі параболалық айнаға, содан кейін екінші гиперболалық айнаға, содан кейін параболалық айнаның ортасындағы тесік арқылы айнаға түскенде Кассегрейн схемасы жүзеге асырылады. анализатор блогы, содан кейін ол әртүрлі фотодетекторларға бағытталады және компьютер арқылы тіркеледі.
Кәдімгі астрономиялық аспап ретінде жұмыс істегенде телескоп Ньютон схемасын жүзеге асырады: негізгі параболалық айнаның оптикалық осіне жалпақ айна енгізіледі, оның көмегімен негізгі айна қабылдаған кескін 90 градус бұрышта көрсетіледі. телескоптың айналу осінің бойымен. Осы Ньютон фокусына окуляр немесе бейнекамера қойып, жұлдызды аспан нысандарының кескіндерін алуға болады.
2) Раман арналары бар көп толқынды лидар
Импульстік эмитент: Nd:YAG лазері
Толқын ұзындығы: 1064, 532 және 355 нм
Импульстік энергия: 100/55/30 мДж
Импульс ұзақтығы: 10 нс
Импульсті жіберу жиілігі: 10 Гц
Лазер сәулесінің диаметрі (ұзартылған): 50мм
Лазерлік дивергенция: 0,3 мрад
Телескоп (диаметрі): Cassegrain, 300 мм негізгі айна
Радиацияны қабылдау бұрышы: 0,6 - 5 мрад
Серпімді шашырау толқын ұзындығы: 1064, 532, 532 деполяризация және 355 нм
Раман толқын ұзындығы: 387, 407, 607 нм
3 . 3 Грегори Ленс
Бұл схеманы 1663 жылы Джеймс Грегори ойлап тапқан. Григорий жүйесінде негізгі ойыс параболалық айнадан сәулелену шағын ойыс эллиптикалық айнаға бағытталған, ол негізгі айнаның орталық тесігіне орналастырылған фотодетекторға сәулені көрсетеді. Қосымша айнаның болуы фокус аралығын ұзартады және осылайша жоғары үлкейтулерді пайдалануға мүмкіндік береді.
Григорий схемасы бойынша құрастырылған қабылдау телескопының өлшемі Ньютон телескопынан үлкен және Кассегрейн линзасынан екі есе дерлік үлкен, бұл экрандауды арттырады, реттеуді және оның қауіпсіздігін, тасымалдауды және жалпы пайдалануды қиындатады.
Бұл схема Ньютон және Кассегрейн схемалары сияқты кең тараған жоқ, өйткені басқа нәрселер тең болған кезде оның кемшіліктері маңыздырақ және кейбір нақты жағдайларда қолданылады.
Қорытынды
Лидарларда қолданылатын айна линзаларын зерттеу және әртүрлі схемаларды бір-бірімен салыстыру барысында мен келесі қорытындыға келдім:
Айна линзаларының бірқатар артықшылықтары бар (линзалармен салыстырғанда):
* Жоғары диафрагма және ажыратымдылық
* Айналарда хроматикалық аберрациялар жоқ
* Жоғары жарық өткізгіштігі
* Айна жүйелерінің салыстырмалы қарапайым дизайнымен сфералық аберрацияны жеткілікті түрде тамаша түзетуге болады.
* Айна жүйелерінде сыну беттері жоқ, сондықтан ИК және ультракүлгін спектрлік аймақтарда қолдануға ыңғайлы
Бірақ артықшылықтардан басқа, айна линзаларының кемшіліктері де бар:
* Асфералық айна беттерін жасау және басқарудағы қиындықтар
* Айна жүйелерін реттеудің қиындығы
* Үлкен айналарды пайдаланумен байланысты қиындықтар (ауа райы жағдайларының әсері, термиялық тұрақтандыру қажеттілігі)
* Айна жүйелерінде, әдетте, жүйенің пайдалы өрісін азайтатын үлкен кома бар. Бұл кемшілік айна-линза схемаларын қолдану арқылы жойылады.
Ұқсас құжаттар
Призма монокулярлы: түсінігі, мақсаты, конструкциялық ерекшеліктері. О.Малафеевтің призма жүйесі бар монокулярлардың оптикалық конструкциясын қарастыру, негізгі элементтері: линза, окуляр. Сәулелердің кері жолындағы призмасы бар окулярды аберрациялық есептеу кезеңдері.
курстық жұмыс, 18.01.2013 қосылған
Құрылғының оптикалық жүйесінің өлшемдік есебі. Микроскоп компоненттерінің негіздемесі. Компьютерде оптикалық линзалар жүйесін зерттеу. Жобалық параметрлерді есептеу. Кеңістіктегі линзаның сандық апертурасы. Гюйгенс окулярының оптикалық параметрлері.
курстық жұмыс, 19.03.2012 қосылған
Камера оптикалық құрылғы ретінде. Фотографиялық линзаның фокус аралығы. Фотографиялық линзаның көру өрісі. Объектив апертурасы. Шағылысқан жабындар. Салыстырмалы тесіктердің стандартты қатары. Фотообъективтің ажыратымдылығы және гиперфокальды қашықтық.
презентация, 30.01.2015 қосылды
Оптикалық құралдар нарығының әртүрлілігі. Кескінді контраст әдістері. Слайдтар мен жабындар. Линзаны қорғау құрылғылары. Призмалар мен айналар жүйесі. Санау камералары мен өлшеуіш аспаптар. Қазіргі заманғы тікелей металлургиялық микроскоптар.
аннотация, 27.11.2014 жылы қосылды
Идеал оптикалық жүйе. Призманы есептеу, окулярды таңдау. Осьтік симметриялы және кеңістіктік оптикалық жүйе. Дизайн параметрлері, линза және призманың аберрациясы. Монокулярлық аберрацияларды есептеу. Тор сызбасын шығару. Объектілер кеңістігінің триорасы.
сынақ, 10/02/2013 қосылды
Жарық микроскоптарының түрлері, олардың жабдықтары. Микроскопты қолдану және күту ережелері. Оптикалық аспаптарда қолданылатын линзалардың классификациясы. Жарық микроскоптарының иммерсиялық жүйелері және санау камералары. Кескінді контраст әдістері.
аннотация, 10/06/2014 қосылды
Кеме жасаудың дамуындағы электротехниканың рөлі. Асинхронды қозғалтқышты тітіркендіргіш роторлы басқарудың функционалдық схемасы. Желдеткіштің электр тізбегінің жұмыс принципі. Электр тізбегін орнату технологиясы, қолданылатын материалдар мен құралдар.
курстық жұмыс, 12/12/2009 қосылған
Аркадьев-Мракс схемасы бойынша құрастырылған газ толтырылған импульстік кернеу генераторының негізгі тізбектеріне теориялық талдау. ЖИН разряд тізбегі мен разряд тізбегінің мерзімділігіне есептеу. ЖИН токты және кернеуді өлшеу. Дизайн.
курстық жұмыс, 19.04.2011 қосылған
Кернеу импульсінің генераторының сұлбасын таңдау және жалпы жобалық схемасы. Генератордың разряд тізбегін, разрядты, алдыңғы және демпфер кедергілерін, импульстік сынақ қондырғысының ажыратқыштарын есептеу. Орнатуды басқару схемасын әзірлеу.
курстық жұмыс, 29.11.2012 қосылған
Электрондық сигналдарды оптикалық сәулеленуге немесе адамның қабылдауына қолжетімді кескінге түрлендіретін құрылғылар ретінде электрооптикалық түрлендіргіштердің түсінігі және практикалық қолдану бағыттары. Құрылымы, мақсаттары мен міндеттері, жұмыс істеу принципі.
Түнгі жол-көлік оқиғасының мән-жайын құжаттау керек пе? Құрғақ жерлерде суару жүйелерін жобалау? Немесе орманмен немесе басқа белгілермен жасырылған археологиялық орындарды зерттеу керек пе? 3D маркшейдерлік және геокеңістіктік деректерді алудың дәстүрлі әдістері көп уақытты қажет етеді және қымбат. Бірақ қазір мұндай мақсаттар үшін тиімдірек және жылдамырақ шешімдер бар.
LiDAR (Жарықты анықтау және диапазон) — жер бедерінің үлгісін жасау үшін жылдам лазерлік импульстарды пайдаланатын қашықтықтан зондтау технологиясы. LiDAR әртүрлі мақсаттар үшін жер бетінің жоғары ажыратымдылықтағы цифрлық карталарын жасау қажет болғанда тамаша. Бұрын ұйымдар әр жағдай үшін өзіндік сипаттамалары бар жеке жүйелерді қолдануға мәжбүр болды.
Олар енді бір 3D карта жасау құрылғысын жасау үшін дрондарға орнатылған LiDAR жүйесін пайдалану мүмкіндігіне ие. ScanLook A-Series LiDAR жүйесі DJI Matrice 600 ұшатын платформасында орнатылған, ол ұшқышсыз технологияға негізделген тиімді, жан-жақты және дәл 3D зондтау шешімін қамтамасыз етеді.
LiDAR және дрондарды практикалық қолдану мысалдары
Пейзажды модельдеу
Жаңа технологиялар жұмысты айтарлықтай жеңілдететін және одан да тиімді ететін қарапайым мысал - қоқыс пен кірді тазалау. Төлем әдетте шаршы метрге төленетіні белгілі, бірақ әсіресе қоқыс, жапырақтар көп шашылып жатса, аумақта бұталар мен ағаштар өссе, есептеулер әрқашан дәл бола бермейді. LiDAR жерүсті зерттеу әдістерімен салыстырғанда айтарлықтай үнемдеуді ұсынады.

LiDAR рельефті зерттеу әдістеріне арналған әр түрлі шығындарды айтарлықтай азайтады. Әр түрлі нысандарды, соның ішінде шөптерді, жапырақтарды немесе ағаштарды қашықтықтан зондтау арқылы LiDAR олардың орнын, қозғалыс жылдамдығын (жылжымалы нысандар үшін) және басқа сипаттамаларды анықтай алады. Ол үшін заттардың бетінен шағылысатын пульсирленген лазер сәулесі қолданылады. Бұл процестің нәтижесі ландшафттың топографиялық контурларының 3D моделі болып табылады, содан кейін пайдаланушылар онымен жұмыс істей алады. Matrice 600 дронын ScanLock көмегімен зерттеу процедурасына қоссаңыз, сканерлеу 4 мың шаршы метрден асатын жылдамдықта жүреді. минутына м. Енді елестетіп көріңізші, 20 минуттық ұшу уақытында қанша жұмыс істеуге болады?
Төтенше жағдайлар мен жазатайым оқиғаларды құжаттау
LiDAR - қажетті нысандардың кескіндерін жасау үшін ультракүлгін және жақын инфрақызыл сәулелерді пайдаланатын белсенді жүйе. Егер жағдайлар жоғары сапалы карта жасау үшін сыртқы жарықтандыруды пайдалануға мүмкіндік бермесе, бұл маңызды. Мысалы, бұл әдіс түнгі жол апатының мән-жайын түсіру үшін қажет болуы мүмкін. Ол үшін ScanLook технологиясы бар Matrice 600 ұшқышсыз ұшағын апат орнында бір рейс кезінде барлық қажетті визуалды ақпаратты сөзбе-сөз түсіру және өңдеу үшін қолданған дұрыс.
Ұсынылған шешім ұшқышсыз технологияға негізделгендіктен, пайдаланушылар визуалды бөлшектермен қамтамасыз етілген нақты ақпаратты дереу алады. Мұның барлығы кейін сот процесінде дәлел ретінде пайдаланылуы мүмкін. Сонымен қатар, аэросканирлеу арқылы тексерудің жоғары жылдамдығы жараланған немесе өлген адамдарды, зақымдалған көліктерді эвакуациялау процесін жылдам бастауға, сонымен қатар аумақты тазалауды тез бастауға көмектеседі. Осылайша, сіз салыстырмалы түрде қысқа мерзімде автокөліктерге арналған жолды тазалай аласыз, бұл әсіресе бос жолдарда маңызды, сонымен қатар жұмыстың барлық кезеңдерінде айтарлықтай ақша үнемдей аласыз.
Ауыл шаруашылығы және ландшафтты жоспарлау
Жаңа 3D картографиялық технологияларды сәтті қолданудың тағы бір мысалы тиімді суару жүйесін құру қажет болатын ірі шаруашылықтар болып табылады. Мысалы, ірі күріш плантацияларында шаруаларға су өткізбейтін жағалаулар жасауға тура келеді. Бұл жер бедері мен топырақ сипаттамаларын нақты білуді талап етеді. Әйтпесе, жасалып жатқан бүкіл жүйе тиімсіз және пайдасыз болып шығуы мүмкін. Тағы да, оңтайлы шешім - ScanLock технологиясы орнатылған Matrice 600 дрон. Деректерді жинау бір өту үшін 183 метр жылдамдықпен жүреді. Бір үлкен кен орнымен жұмыс істеу процесі көп уақытты қажет етпейді. Бұл ретте бұрынғыдай егістік алқаптардың кеуіп кетуін күтудің қажеті жоқ, сонда оларда деректер жинауға арналған тиісті техника орналастырылады.
Археология
Үлкен, тарихи құнды ландшафттарды түсірудің дәстүрлі әдістері көп жылдық жұмысты қажет ететін жерлерде, LiDAR технологиясын енді 3D картасын жасау процесін бірнеше минут ішінде аяқтау үшін пайдалануға болады. Тағы да, мұндай процедураның ең жақсы нұсқасы Matrice 600 ұшқышсыз «Жоғалған» жерлерге ScanLock орнату болады және ең қысқа мерзімде бүкіл ежелгі қалалар ашылады.
Тегтер: Лидар, эмитент, сигнал, когерентті, когерентсіз, сканерлеу оптикасы
Лидарлар
LIDAR (Light Identification Detection and Ranging) – мөлдір және мөлдір ортада жарықтың шағылысу және шашырау құбылыстарын пайдаланатын белсенді оптикалық жүйелерді пайдалана отырып, алыстағы объектілер туралы ақпаратты алу және өңдеу технологиясы.
Құрылғы ретінде Lidar белсенді оптикалық диапазонды өлшегіш болып табылады. Лидарларды сканерлеукомпьютерлік көру жүйелерінде қоршаған кеңістіктің екі өлшемді немесе үш өлшемді суреті қалыптасады. «Атмосфералық»лидарлар мөлдір емес шағылыстыратын нысандарға дейінгі қашықтықты анықтауға ғана емес, сонымен қатар жарықты тарататын мөлдір ортаның қасиеттерін талдауға қабілетті. Атмосфералық лидар түрі болып табылады Доплерографияатмосфераның әртүрлі қабаттарындағы ауа ағындарының қозғалысының бағыты мен жылдамдығын анықтайтын лидарлар.
Жұмыс принципі
Лидардың жұмыс істеу принципі радардан онша ерекшеленбейді: сәулелену көзінен бағытталған сәуле нысаналардан шағылысады, көзге оралады және жоғары сезімтал қабылдағышпен (лидар жағдайында, фотосезімтал жартылай өткізгіш) түсіріледі. құрылғы); жауап беру уақыты нысанаға дейінгі қашықтыққа тура пропорционал.

Лидардың жұмыс принципі қарапайым. Нысан (бет) жарықтың қысқа импульсімен жарықтандырылады және сигналдың көзге оралу уақыты өлшенеді. Жарық өте жылдам таралады - 3∙10 8 м/с. Дегенмен, ол белгілі бір кідіріспен қайтарылады, бұл нысанға дейінгі қашықтыққа байланысты.
Фотонның нысанға және кері қарай жүріп өткен жолын мына формула арқылы есептеуге болады:
L = c ∙ t аралығы 2
Осы қысқа уақыт аралығын өлшеуге қажетті жабдық өте жылдам жұмыс істеуі керек.
Лидар секундына 150 000 импульсқа дейінгі жылдамдықпен объектіге (бетке) лазер сәулесінің жылдам, қысқа импульстерін шығарады. Құрылғыдағы сенсор импульстің қайтарылуына қажетті уақыт мөлшерін өлшейді. Жарық тұрақты жылдамдықпен таралады, сондықтан лидар оны мен нысана арасындағы қашықтықты жоғары дәлдікпен есептей алады.
Барлық жағдайларда радиожүйе сигналдарды кедергі фонында анықтайды. Пайдалы сигнал жүйенің ω c = ω 0 резонанстық баптау жиілігіне тең жиілікке ие деп есептеледі. Бастапқы фаза нөлге тең:
U c t = U см sin ω 0 т
Сигнал мен шудың қосындысы:
U sp t = u c t + u p t = U см + U p1 sin ω 0 t + U p2 cos ω 0 t
Қайда U p1Және U p2– кедергі амплитудалары.
- Когерентсіз анықтау (тікелей өлшеу әдісі): Толық тербеліс пен кедергінің амплитудасына жауап береді. U spmСигналдың шудан асып кетуі келесі қатынасты құрайды: m ng 2 = U см 2 U p1 2 + U p2 2 = U см 2 2σ 2 мұндағы σ 2– кедергі амплитудаларының әрқайсысының дисперсиясы U p1Және U p2
- Когерентті анықтау: сигналға ортогональды кедергі құрамдас бөлігін толығымен жояды. Ол Ucm сигнал амплитудасының және U p1 кедергінің жалпы режимдік компонентінің қосындысына тең тербеліске ғана жауапты қамтамасыз етеді. Когерентті анықтау кезінде сигналдың шудан асып кетуі m кг 2 = U см 2 U _ p1 2 қатынасы болып табылады, мұндағы U _ p1 2 - жалпы режимдік компоненттің амплитудасының дисперсиясы. Когерентті жүйелер Доплер немесе фазаға сезімтал өлшемдер үшін ең қолайлы және әдетте оптикалық гетеродинді анықтауды пайдаланады. Бұл олардың әлдеқайда аз қуатта жұмыс істеуіне мүмкіндік береді, бірақ фотодетектор схемасының дизайны әлдеқайда күрделі.
Импульстік лидарлардың екі негізгі категориясы бар: микроимпульстік және жоғары энергиялық жүйелер.
- Микроимпульстік лидарларүлкен есептеу мүмкіндіктері бар қуаттырақ компьютерлік технологияда жұмыс істеу. Бұл лазерлердің қуаттылығы төмен және «көзге қауіпсіз» ретінде жіктеледі, бұл оларды арнайы сақтық шараларын аз немесе мүлдем қолданбай пайдалануға мүмкіндік береді.
- Лидарларжоғары импульстік энергия негізінен атмосфералық зерттеулерде қолданылады, мұнда олар көбінесе бұлт биіктігі, қабаттар мен тығыздық, бұлт бөлшектерінің қасиеттері, температура, қысым, жел, ылғалдылық және атмосфералық газ концентрациясы сияқты әртүрлі атмосфералық параметрлерді өлшеу үшін қолданылады.
Тек жеткілікті үлкен металл нысаналардан тиімді шағылысатын радиотолқындардан айырмашылығы, жарық толқындары кез келген ортада, соның ішінде ауада шашырауға ұшырайды, сондықтан мөлдір емес (жарық шағылыстыратын) дискретті нысандарға дейінгі қашықтықты анықтауға ғана емес, сонымен қатар мөлдір ортада жарықтың шашырау қарқындылығын жазу. Қайтарылатын шағылысқан сигнал көзден шыққан сәуле сияқты бірдей шашырау ортасынан өтеді және екінші реттік шашырауға ұшырайды, сондықтан таралған оптикалық ортаның нақты параметрлерін қалпына келтіру аналитикалық және эвристикалық әдістермен шешілетін өте күрделі міндет болып табылады.
Эмитент
Конструкциялардың басым көпшілігінде эмитент лазер болып табылады, ол жоғары лездік қуаттағы жарықтың қысқа импульстарын жасайды. Импульстің қайталану жиілігі немесе модуляциялау жиілігі екі дәйекті импульс арасындағы үзіліс анықталатын нысаналардың жауап беру уақытынан кем болмайтындай етіп таңдалады (бұл құрылғының болжалды диапазонынан физикалық түрде алыс орналасуы мүмкін). Толқын ұзындығын таңдау лазердің функциясына және құрылғының қауіпсіздік және құпиялылық талаптарына байланысты; Ең жиі қолданылатын лазерлер Nd:YAG лазерлері және келесі толқын ұзындықтары (нанометрлерде):
- 1550 нм - бұл адам көзіне және әдеттегі түнгі көру құрылғыларына көрінбейтін инфрақызыл сәуле. Көз бұл толқындарды тордың бетіне шоғырландыра алмайды, сондықтан 1550 толқынының жарақат шегі қысқа толқындарға қарағанда айтарлықтай жоғары.
- 1064 нм - көзге көрінбейтін, бірақ түнде көру құрылғыларымен анықталатын неодим және иттербий лазерлерінің жақын инфрақызыл сәулесі
- 532 нм - су массасын тиімді «тесетін» неодим лазерінің жасыл сәулесі
- 355 нм – ультракүлгін сәулеленуге жақын
Сондай-ақ қысқа импульстардың орнына айнымалы кернеу сәулеленуінің үздіксіз амплитудалық модуляциясын қолдануға болады.
Сканерлеу оптикасы
Ең қарапайым атмосфералық лидар жүйелерінде бағыттау құралдары жоқ және вертикальды зенитке бағытталған.
Көкжиекті бір жазықтықта сканерлеу үшін қарапайым сканерлеу бастары пайдаланылады. Оларда стационарлық эмитент пен қабылдағыш те зенитке бағытталған; Айна радиация осінің айналасында айналатын горизонтқа және сәулелену сызығына 45 ° бұрышта орнатылады. Тасымалдаушы әуе кемесінің ұшу бағытына перпендикуляр жолақты сканерлеу қажет болған авиациялық қондырғыларда сәулелену осі көлденең болады. Айнаны айналдыратын қозғалтқышты және қабылданған сигналды өңдеуге арналған құралдарды синхрондау үшін ротордың позициясының дәл сенсорлары, сондай-ақ сканерлеу басының мөлдір корпусына қолданылатын бекітілген анықтамалық белгілер қолданылады.
Екі жазықтықта сканерлеу осы схемаға айнаны бастың әрбір айналымымен бекітілген бұрышпен айналдыратын механизмді қосады - осылайша қоршаған әлемнің цилиндрлік сканерлеуі қалыптасады. Егер сізде жеткілікті есептеу қуаты болса, сіз қатты бекітілген айна мен әртүрлі сәулелер шоғын пайдалана аласыз - бұл дизайнда бастың бір айналымына бір «кадр» қалыптасады.
Сигналдарды қабылдау және өңдеу
Қабылдау жолының динамикалық диапазоны маңызды рөл атқарады. Қарқынды жарықпен қабылдағышты «жақын аймақта» шашыраудан шамадан тыс жүктеуді болдырмау үшін ұзақ қашықтықтағы жүйелер қабылдау оптикалық арнасын физикалық түрде блоктайтын жоғары жылдамдықты механикалық жапқыштарды пайдаланады. Жауап беру уақыты микросекундтан аз қысқа қашықтықтағы құрылғыларда бұл мүмкін емес.
Ағымдағы жағдайы және болашағы
Атмосфераны зерттеу
Стационарлық лидарлармен атмосфераны зерттеу технологияны қолданудың ең кең таралған саласы болып табылады. Атмосфералық құбылыстарды бақылау үшін дүние жүзінде бірнеше тұрақты зерттеу желілері (мемлекетаралық және университет) орналастырылған.
Орман өрттері туралы алдын ала ескерту
Төбеге (төбеге немесе діңгекке) қойылған және көкжиекті сканерлейтін лидар ауадағы өрттерден туындаған ауытқуларды ажырата алады. Тек жылулық аномалияларды танитын пассивті инфрақызыл жүйелерден айырмашылығы, лидар түтінді жану бөлшектерінен туындайтын ауытқулар, химиялық құрамы мен ауаның мөлдірлігінің өзгеруі және т.б.
Жерді зерттеу
Алынған шағылысқан жарық атмосфераның ластанған төменгі қабаттарында шашырау салдарынан шулы болатын лидарды жерге орнатудың орнына, «атмосфералық» лидарды ауаға немесе орбитаға көтеруге болады, бұл сигналды айтарлықтай жақсартады- шуылға қатынасы және жүйенің тиімді диапазоны.
Құрылыс және тау-кен ісі
Тұрақты объектілерді (ғимараттар, қалалық ландшафттар, ашық кеніштер) сканерлейтін лидарлар салыстырмалы түрде арзан: объект стационарлық болғандықтан, сигналды өңдеу жүйесінен арнайы өнімділік талап етілмейді және өлшеу циклінің өзі айтарлықтай ұзақ уақытты алуы мүмкін (минут). ).
Теңіз технологиясы
Теңіз тереңдігін өлшеу. Бұл тапсырма үшін ұшақ негізіндегі дифференциалды лидар қолданылады. Қызыл толқындар теңіз бетінде дерлік шағылысады, ал жасыл толқындар суға ішінара еніп, оған шашырап, теңіз түбінен шағылысады. Өлшеудегі үлкен қателіктерге және өлшенетін тереңдіктердің аз диапазонына байланысты технология азаматтық гидрографияда әлі қолданылған жоқ.
Балықты іздеу. Ұқсас құралдар жер бетіне жақын су қабаттарында балық үйірлерінің белгілерін анықтай алады. Американдық ESRL мемлекеттік зертханасының мамандары лидарлармен жабдықталған жеңіл ұшақтармен балықты іздеу жаңғырықпен жабдықталған кемелерге қарағанда кем дегенде магнитудасы арзанырақ деп мәлімдейді.
Теңіздегі адамдарды құтқару. 1999 жылы АҚШ Әскери-теңіз күштері теңіз бетінде адамдар мен адам денелерін іздеуге пайдалы ұшақ лидар дизайнын патенттеді; Бұл дамудың іргелі жаңалығы - кедергі әсерін азайтатын шағылысқан сигналдың оптикалық маскировкасын қолдану.
Миналарды жою. Миналарды анықтау тікелей суға батқан лидарларды қолдану арқылы мүмкін болады (мысалы, қайық немесе тікұшақ сүйреген қалқымадан), бірақ белсенді акустикалық жүйелермен (сонарлар) салыстырғанда ешқандай артықшылығы жоқ.
Көлікпен
Көлік жылдамдығын анықтау. Австралияда қарапайым лидарлар көліктердің жылдамдығын анықтау үшін қолданылады - полиция радарлары сияқты. Оптикалық «радар» дәстүрліге қарағанда әлдеқайда ықшам, бірақ қазіргі жолаушылар вагондарының жылдамдығын анықтауда сенімді емес: күрделі пішіндегі көлбеу жазықтықтардың шағылыстары лидарды «шатастыруда».
Автономды көліктер. 1987 жылдан 1995 жылға дейін Еуропалық Одаққа 1 миллиард доллардан астам шығын әкелген EUREKA Prometheus жобасы өздігінен жүретін автомобильдердің алғашқы практикалық әзірлемелерін шығарды. Ең танымал прототипі VaMP (Мюнхендегі Бундесвер университеті әзірлеген) сол кездегі процессорлардың есептеу қуатының болмауына байланысты лидарларды пайдаланбады. Олардың ең жаңа әзірлемесі, MuCAR-3 (2006) көлік құралының төбесінен жоғары орнатылған 360 градустық жалғыз лидарды, сонымен қатар алға бағытталған мультифокалды камера мен инерциялық навигация жүйесін пайдаланады.
Өнеркәсіптік және сервистік роботтар. IBM сканерлеу lidar негізіндегі роботтарға арналған жақын қашықтықтағы машиналық көру жүйелері көкжиек қамту бұрышы 360° және тік көру бұрышы +30..-30° дейін цилиндрлік сканерлеуді құрайды. Сканерлеуші оптикалық бастың ішіне орнатылған диапазон өлшегіштің өзі шамамен 10 МГц тасымалдаушы жиілігімен модуляцияланған тұрақты төмен қуатты сәулеленуде жұмыс істейді. Нысанаға дейінгі қашықтық (тасымалдаушы 10 МГц – 15 м артық емес) жарық көзін модуляциялайтын анықтамалық осциллятор мен жауап сигналы арасындағы фазалық ығысуға пропорционалды.
Ru-Cyrl 18-оқулық Сыпачев С.С. 1989-04-14 [электрондық пошта қорғалған]Степан Сыпачевстуденттер
Әлі анық емес пе? – пошта жәшігіне сұрақтар жазу
Бұл бөлімде мөлдір және мөлдір ортада жарықтың шағылысу және шашырау құбылыстарын пайдаланатын белсенді оптикалық жүйелерді пайдалана отырып, алыстағы объектілер туралы ақпаратты алу және өңдеудің жалпы технологиясы бар OEPiS тобын қарастырамыз.
Оптикалық құралдардың бұл тобы - деген атпен біріктірілген. Лидар(транслитерация ЛИДАРАғылшын Жарықты анықтау, анықтау және диапазонды анықтау) .
LIDAR-дың «лазерлік радар» ретінде белгіленген аудармасы мүлдем дұрыс емес, өйткені LIDAR бірінші аббревиатурасы 1953 жылы Миддлтон мен Спильхаустың «Метеорологиялық аспаптар» жұмысында лазерлер ойлап табылғанға дейін пайда болды. Алғашқы лидарлар жарық көзі ретінде қысқа импульс тудыратын жоғары жылдамдықты жапқыштары бар қарапайым немесе жарқыл шамдарын пайдаланды. Қазіргі заманғы қысқа қашықтықтағы жүйелерде (мысалы, ішкі пайдалануға арналған) лазердің орнына әдеттегі жарықдиодты шамдар қолданылады. Дегенмен, лазерді пайдалану (өзінің қасиеттеріне байланысты: когеренттілігі, жоғары тығыздығы және радиациялық қуаты) жүздеген метрден жүздеген километрге дейінгі диапазондағы құрылғыларды жасауға мүмкіндік берді.
Сәулелену қуаты 2,5 Вт және өлшенген қашықтығы 200-9995 м диапазоны бар XM-23 киілетін лазерлік қашықтық өлшегіштің алғашқы далалық сынақтары 1963 жылы өтті. Сонымен бірге, 1960 жылдардың бірінші жартысында атмосфераны зерттеу үшін лазерлік сәуле шығарғыштары бар лидарды қолдану бойынша тәжірибелер басталды. 1969 жылы Жерден Айға дейінгі қашықтықты өлшеу үшін Аполлон 11-де орнатылған лазерлік қашықтық өлшегіш және нысана пайдаланылды. Айға үш Аполлос пен Луноход 2 жеткізген төрт нысана әлі күнге дейін Айдың орбитасын бақылау үшін пайдаланылады. 1970 жылдары бір жағынан лазерлік диапазон өлшегіштер мен ықшам жартылай өткізгіш лазерлердің технологиясы нақты реттелсе, екінші жағынан атмосферада лазер сәулесінің шашырауын зерттеу жұмыстары басталды.
Оптикалық құрылғылардың осы тобын қарастыруды ең қарапайым өкілі - лазерлік қашықтық өлшегіштен бастайық. Жұмыс принципі электромагниттік сәулеленудің тұрақты жылдамдықпен таралу қабілетіне негізделген, бұл объектіге дейінгі қашықтықты анықтауға мүмкіндік береді. Осылайша, импульстік диапазон әдісімен келесі қатынас қолданылады:
мұндағы R – объектіге дейінгі қашықтық, с – вакуумдегі жарық жылдамдығы, n – сәуле таралатын ортаның сыну көрсеткіші, t – импульстің нысанаға және кері өтуіне кететін уақыт.
132-сурет Лазерлік қашықтық өлшеуіштің жұмыс принципі.
Бұл қатынасты қарастыру диапазонды өлшеудің потенциалды дәлдігі энергия импульсінің объектіге және кері жүруіне кететін уақытты өлшеу дәлдігімен анықталатынын көрсетеді. Импульс неғұрлым қысқа болса, соғұрлым жақсы болатыны анық. Қашықтық өлшегіш пен нысана арасындағы қашықтықты анықтау міндеті зондтау сигналы мен нысанадан шағылысқан сигнал арасындағы сәйкес уақыт аралығын өлшеуге келеді. Диапазон өлшегіште қолданылатын лазерлік сәулеленудің модуляция түріне байланысты диапазонды өлшеудің үш әдісі бар: импульстік, фазалық немесе импульстік фаза.
Мәні импульстік диапазон әдісіобъектіге зондтау импульсін жіберуден тұрады, ол сонымен қатар қашықтық өлшегіште уақыт санауышын іске қосады. Нысан шағылған импульс қашықтық өлшегішке жеткенде ол санауышты тоқтатады. Уақыт аралығы негізінде (шағылған импульстің кешігуі) нысанға дейінгі қашықтық анықталады.
Сағат фазалық диапазон әдісілазерлік сәулелену модулятордың (электр сигналының әсерінен параметрлерін өзгертетін электрооптикалық кристал) көмегімен синусоидалы заңға сәйкес модуляцияланады. Әдетте жиілігі 10...150 МГц (өлшеу жиілігі) синусоидалы сигнал қолданылады. Шағылысқан сәуле қабылдаушы оптикаға және фотодетекторға түседі, онда модуляциялық сигнал шығарылады. Объектіге дейінгі қашықтыққа байланысты шағылысқан сигнал фазасы модулятордағы сигнал фазасына қатысты өзгереді. Фазалар айырмашылығын өлшеу арқылы объектіге дейінгі қашықтық анықталады.
Ең қарапайым лидардың жалпы блок-схемасы 133-суретте көрсетілген және қазіргі заманғы әскери техникада олар тіпті біріктірілген түнгі көру құрылғысына ұқсас;
133-сурет. Ең қарапайым лидардың жалпы құрылымдық схемасы (1-лазер, 2-объект, 3-қабылдағыш блок, 4-оптикалық жүйе POI (телескопиялық жүйе), 5-POI, 7-өңдеу және талдау блогы, 7-ақпаратты шығару блогы , 8 - лазерлік басқару блогы.
134-суретте лазерлік ретрорефлекторлармен жабдықталған ғарыш аппараттарына дейінгі қашықтықты анықтау және ғарыш кемесі қозғалысының жоғары дәлдіктегі параметрлерін есептеу үшін шағылысқан күн радиациясын пайдалана отырып, ғарыш аппаратының бұрыштық координаттарын өлшеу үшін қолданылатын қазіргі заманғы ресейлік «Сажен-ТМ-Д» лазерлік қашық өлшегіші көрсетілген. сондай-ақ көрінетін толқын ұзындығы диапазонында фотометриялық ақпаратты алу.
Тек жеткілікті үлкен металл нысаналардан тиімді шағылысатын радиотолқындардан айырмашылығы, жарық толқындары кез келген ортада, соның ішінде ауада шашырауға ұшырайды, сондықтан мөлдір емес (жарық шағылыстыратын) дискретті нысандарға дейінгі қашықтықты анықтауға ғана емес, сонымен қатар мөлдір ортада жарықтың шашырау қарқындылығын жазу.
134-сурет «Сажен-TM-D» қашықтық өлшегіш
Бұл атмосфералық аэрозоль арқылы лазерлік сәуле шашырауының қарқындылығын өлшеу одан әрі дамуға екінші күшті серпін берді. Лидар атмосфераға қысқа жарық импульсін жібереді және кері шашырау сигналын алады. Атмосферада жарықтың шашырауы ауа молекулаларымен де (Рэлей шашырауы) да, аэрозоль бөлшектерімен де жүреді. Осылайша, атмосферада аэрозольдің болуы таза атмосфераға қатысты кері шашырау сигналын арттырады, ал аэрозоль концентрациясын таза атмосфераға қарсы қашықтық пен сигнал қарқындылығының функциясы ретінде анықтауға болады. Антропогендік атмосфераны ластаушы заттардың жалпы массасының 10%-дан аспайтын аэрозольдер құрайтынына қарамастан, әдетте күшті токсикант болып табылатын ластаушы заттардың осы түрінен ықтимал зиян айтарлықтай жоғары. «Атмосфералық» лидарлармөлдір емес шағылыстыратын нысандарға дейінгі қашықтықты анықтауға ғана емес, сонымен қатар жарықты тарататын мөлдір ортаның қасиеттерін талдауға қабілетті. Атмосфералық лидар түрі болып табылады Доплерлік лидарлар, атмосфераның әртүрлі қабаттарындағы ауа ағындарының қозғалысының бағыты мен жылдамдығын анықтайтын.
Атмосфералық лидарлардың жұмысының физикалық принциптерін біз ИҚ газ анализаторлары бөлімінде егжей-тегжейлі талқыладық. Мұнда біз осы типтегі лидарлардың дизайн ерекшеліктеріне тоқталамыз. Мысал ретінде атмосфераның қауіпті ластануын көп толқынды лазерлік қашықтықтан талдаудың заманауи әдістемесін қарастырайық. Ерекшелігі мынада, лазерлік көздер бір бағытта бір уақытта бірнеше толқын ұзындығында сәуле шығара алады. Бұл мүмкіндік береді:
нақты уақыт режимінде қауіпті қоспалардың бірнеше компоненттерінің (6-ға дейін) концентрацияларын бір уақытта анықтау және өлшеу;
атмосфералық турбуленттілікке байланысты қабылданған сигналдың уақытша ауытқуының әсерін азайту арқылы қауіпті қоспалардың концентрациясын өлшеу дәлдігін айтарлықтай арттыру.
Көп толқынды лидарда негізгі лазерлік жүйелер ретінде СО 2 және СО 2 молекуласының изотоптары (диапазоны 9-11 мкм) және олардың екінші (диапазоны 4,5-5,5 мкм) және үшінші (диапазон 3,0) бойынша импульстік периодты лазерлер қолданылады. -3,4 мкм) де қолдануға болады ) 5-10% түрлендіру тиімділігімен AgGaSe 2 немесе ZnGeP 2 сияқты сызықты емес кристалдардағы негізгі лазерлердің сәулелену жиілігін түрлендіру арқылы алынған гармоникалар. Анықталған ауа құрамдастары бірінен соң бірі анықталатын дифференциалды лазерлік газды талдаудың қазіргі қолданыстағы стандартты схемаларынан түбегейлі айырмашылығы, көп толқынды лазерлік жүйелерде бір мезгілде аналитикалық толқын ұзындығының жиынтығын генерациялау есебінен оларды бір уақытта дерлік анықтауға болады. және бірнеше қауіпті газтәрізді заттардың концентрациясы жоғарылаған атмосфералық көлемнен өткеннен кейін оларды бір мезгілде анықтау.
Атмосфераны бақылау үшін көп толқынды аммиак лазері негізіндегі лидарды қолдану схемасы 135-суретте көрсетілген.Көп толқынды лидардың құрылымдық схемасы және оның негізгі оптикалық құрылымы 136 және 137-суреттерде көрсетілген.
Сурет 135. Көп толқынды лидарларды қолдану диаграммасы
136-сурет. Блок – көптолқынды лидардың диаграммасы
137-сурет. Көп толқынды лидардың схемалық оптикалық диаграммасы
(М – айналар)
Қашықтан бақылаудың соңғы әдістерін қолдана отырып, көп толқынды газ анализаторы (диапазон 10 км-ге дейін) өндіріс пен өмірдің әртүрлі салаларында тиімді пайдаланылуы мүмкін: қауіпті химиялық өндіріс объектілерінің жанында атмосфераға шығарындыларды бақылау;
ядролық отын циклі кәсіпорындарындағы газды және/немесе ағуды бақылау;
төтенше жағдайларды анықтау, төтенше жағдайлар кезінде атмосфералық ауаның ластану жағдайына мониторинг жүргізу;
маңызды объектілердің – мемлекеттік ғимараттардың, әскери объектілердің, атом электр станцияларының және т.б. қауіпсіздігін қамтамасыз ету.
үшінші елдердегі атом өнеркәсібі объектілерінен шығарылатын газдар шығарындыларын анықтау, демек, осы елдердің ядролық қару жасау қабілетін анықтау мақсатында қашықтықтан (мысалы, ұшақтан немесе ұшқышсыз спутниктен) мониторинг жүргізу;
ауқымды авариялар кезінде атмосфераға улы бұлттардың таралу динамикасын анықтау;
138-суретте атмосфералық аэрозольдар мен бұлттарды дыбыстауға арналған LSA-2c екі толқынды лидар және 4Р бір толқынды лидар көрсетілген.
Олардың лидарлар үшін бірдей негізгі сипаттамалық блоктары бар:
- лазерлік таратқыш;
-таратқыш оптикалық жүйе;
- қабылдаушы оптикалық жүйе;
-спектрлік талдау және тіркеу құрылғысы (PMT, CCD камера, көшкін фотодиод);
- сигналдарды өңдеу блогы;
-Басқару блогі;
- алынған ақпаратты бейнелеу жүйесі.
138-сурет. Екі толқынды лидар ЛСА-2 және бір толқынды лидар 4П.
Жоғарыда атап өткеніміздей, лидарлардағы негізгі сәуле шығарушы - жоғары лездік қуаттың қысқа импульстарын тудыратын лазер. Импульстің қайталану жиілігі немесе модуляциялау жиілігі екі дәйекті импульс арасындағы үзіліс анықталатын нысаналардың жауап беру уақытынан кем болмайтындай етіп таңдалады (бұл құрылғының болжалды диапазонынан физикалық түрде алыс орналасуы мүмкін). Толқын ұзындығын таңдау лазердің функциясына және құрылғының қауіпсіздік және құпиялылық талаптарына байланысты; Ең жиі қолданылатын Nd:YAG лазерлері және толқын ұзындығы (нанометрде):
§ 1550 нм – адам көзіне көрінбейтін инфрақызыл сәуле және түнгі көрудің әдеттегі құрылғылары. Көз бұл толқындарды тордың бетіне шоғырландыра алмайды, сондықтан 1550 толқыны үшін жарақат шегі қысқа толқындарға қарағанда айтарлықтай жоғары. Дегенмен, көздің зақымдану қаупі көрінетін сәуле шығаратындарға қарағанда жоғарырақ - көз инфрақызыл сәулеленуге әсер етпейтіндіктен, адамның табиғи қорғаныс рефлексі де жұмыс істемейді.
§ 1064 нм - көзге көрінбейтін, бірақ түнде көру құрылғыларымен анықталатын неодим және иттербий лазерлерінің жақын инфрақызыл сәулеленуі
§ 532 нм - су массасын тиімді «тесетін» неодим лазерінің жасыл сәулесі
§ 355 нм – ультракүлгін сәулеленуге жақын
Лидарларды қолдану арқылы шешілетін мәселелер:
· Атмосфераны зерттеу
Стационарлық лидарлармен атмосфераны зерттеу технологияны қолданудың ең қоғамдық саласы болып қала береді. Атмосфералық құбылыстарды бақылау үшін дүние жүзінде бірнеше тұрақты зерттеу желілері (мемлекетаралық және университет) орналастырылған.
· Ауа ағындарының жылдамдығы мен бағытын өлшеу.
Мұндай өлшеулер үшін жердегі доплерлік лидарды қолданудың теориялық негіздемесі 1980 жылдары берілген. Жұмыс принципі Доплер эффектісін қолдануға негізделген, оған сәйкес нысанадан шағылған қабылданған сигналдың жиілігі шығарылатын сигналдың жиілігінен ерекшеленуі мүмкін және айырмашылық объектілердің жылдамдықтарының қатынасына байланысты. бір-бірін. 2001 жылы Alcatel спутниктердің бортына лидарларды орналастыруды ұсынды, осылайша орбитада спутниктердің «шоқжұлдыздары» бүкіл континенттегі және жалпы Жердегі ауа массаларының қозғалысын бақылай алады.
· Атмосфералық температураны өлшеу. Температуралық профильдерді өлшеудің бірнеше негізгі әдістері әзірленді және тәжірибеге енгізілді.
Бірінші әдістеСілтілік металдар атомдарына, атап айтқанда натрий, калий және темірге резонанстық шашырау қолданылады. Металл атомдарының бұлттары 85 - 100 км биіктікте орналасқан. Температура тар диапазонды реттелетін лазермен зондтау арқылы резонанстық сызықтарды Доплер арқылы кеңейту арқылы өлшенеді. Алғашқы өлшеулер зымыранмен атмосфераға лақтырылған жасанды натрий бұлттарының көмегімен жасалды. Әдіс металл атомдары болатын биіктік ауқымымен шектелгенімен, шашыраңқы сигнал салыстырмалы түрде үлкен және бұл температураны 1,5 ˚K дәлдікпен өлшеуге мүмкіндік береді.
Екінші әдіс- ауа молекулаларына жарықтың резонанстық емес шашырауына негізделген Рэйлей шашырау әдісі (Rayleigh lidar). Ол алғаш рет 1953 жылы атмосфераны прожектормен дыбыстау тәжірибесінде қолданылған. Әдістің мәні келесідей. Егер аэрозольдің шашырауы болмаса, онда кері шашыраған сигналдың күші ауаның тығыздығына тура пропорционал болады, одан температураны есептеуге болады. Биіктікте ауаның сирек болуы Рэйлейдің шашырау әдісін 90 км-ден аспайтын биіктікте қолдануға мүмкіндік береді. Өлшеу биіктігінің төменгі шегі (шамамен 20-30 км) шекаралық қабатта шашырауды айтарлықтай арттыратын, бірақ ауа тығыздығына іс жүзінде ешқандай әсер етпейтін аэрозольдің көп мөлшерінің болуына байланысты.
Үшінші әдісауа молекулаларымен (Раман лидар) айналмалы Раман (Раман) шашырауына негізделген. Температура жоғарылаған сайын үлкен кванттық сандармен ауысулардың қарқындылығы артады, ал шағын кванттық сандарға сәйкес айналмалы Раман спектріндегі сызықтардың қарқындылығы төмендейді. Үлкен кванттық сандары бар ауысулар орталық жиіліктен әрі қарай орналасқан Раман спектріндегі сызықтарға сәйкес келеді. Температура әртүрлі температураға тәуелділіктері бар екі спектрлік аймақтағы өлшеулер арқылы анықталады. Ең жоғары зондтау биіктігі шамамен 30 км, өлшеу қателігі 1 ˚К-ден 10 км биіктікке дейін. Қабылдағышта серпімді шашырау сызығы басылғандықтан, өлшеулерді аэрозольдердің айтарлықтай концентрациясы болған кезде жүргізуге болады.
· Орман өрттері туралы алдын ала ескерту.
· Жерді зерттеу
Алынған шағылысқан жарық атмосфераның ластанған төменгі қабаттарында шашырау салдарынан шулы болатын лидарды жерге орнатудың орнына, «атмосфералық» лидарды ауаға немесе орбитаға көтеруге болады, бұл сигналды айтарлықтай жақсартады- шуылға қатынасы және жүйенің тиімді диапазоны. Алғашқы толыққанды орбиталық лидарды LITE (Lidar In-Space Technology Experiment) бағдарламасының бөлігі ретінде 1994 жылы желтоқсанда NASA орбитаға шығарды. 260 км биіктікке көтерілген метрлік айна телескопы бар екі тонналық LITE лидар жердегі диаметрі 300 м бұлдыр дақты «бояды», бұл рельефті тиімді көрсету үшін анық жеткіліксіз болды және тек «атмосфералық» болды.
· Ғарыштық геодезия.
Жер бетінің рельефі қолайлы рұқсатпен сканерленеді.
· Авиациялық геодезия.
АҚШ Ұлттық океанографиялық қызметі (NOAA) жүйелі түрде қолданылады Теңіз жағалауын топографиялық түсіру үшін авиациялық лидарлар бар.
Америка Құрама Штаттарының жер сілкінісі қаупі бар аймақтарында тәжірибеде қолданылатын ерекше бағыт жарықтар аймағындағы жер массаларының жергілікті қозғалысын анықтау үшін биіктіктерді дифференциалды өлшеу болып табылады. 1996 жылы Лидар көмегімен Сиэтл маңында бұрын белгісіз болған бұзылу аймағы табылды.
Жақында Хьюстон университетінің бір топ ғалымдары ұқсас лидарды қолдана отырып, Гондурастың джунглилерінен аты аңызға айналған Алтын қаланы таба алған болуы мүмкін.
139-сурет Бұрын жіктелген әскерилерді пайдалану
лазерлік карта жасау технологиясы.
· Құрылыс және тау-кен ісі
Конструкция - ғимараттарды өлшеу, қабырғалар мен жүк көтергіш колонналардың жазықтықтарының вертикальдан ауытқуын бақылау (динамикасын қоса алғанда), қабырғалар мен шынылау дірілдерін талдау. Шұңқырлардың өлшемдері, қазу жұмыстарының көлемін бағалау үшін құрылыс алаңдарының көлемді үлгілерін жасау.
Архитектура- ұсынылатын жаңа ғимараттардың қала келбетіне әсерін бағалау үшін қалалық ортаның үш өлшемді үлгілерін салу.
Теңіз технологиясы
Теңіздің тереңдігін өлшеу. Бұл тапсырма үшін ұшақ негізіндегі дифференциалды лидар қолданылады. Қызыл толқындар теңіз бетімен толығымен дерлік шағылысады, ал жасыл толқындар суға жартылай еніп, оған шашырап, теңіз түбінен шағылысады. Өлшеудегі үлкен қателіктерге және өлшенетін тереңдіктердің аз диапазонына байланысты технология азаматтық гидрографияда әлі қолданылған жоқ.
Балықты іздеу. Ұқсас құралдар жер бетіне жақын су қабаттарында балық үйірлерінің белгілерін анықтай алады. Американдық ESRL мемлекеттік зертханасының мамандары лидарлармен жабдықталған жеңіл ұшақтармен балықты іздеу жаңғырықпен жабдықталған кемелерге қарағанда кем дегенде магнитудасы арзанырақ деп мәлімдейді.
· Өнеркәсіптік және сервистік роботтар
IBM сканерлеу lidar негізіндегі роботтарға арналған жақын қашықтықтағы машиналық көру жүйелері көкжиек қамту бұрышы 360° және тік көру бұрышы +30..-30 дейін цилиндрлік сканерлеуді құрайды.
· Әскери технология
Мұнда лидарлар кеңінен қолданылады және оптикалық-орналасу, барлау, нысананы бағыттау және т.б. функцияларын орындайды.
Сурет 139. Шабуыл зымыраны детекторы (AMD), OLS-35 оптикалық орналасу станциясы
140-сурет. Халықаралық шарттарға сәйкес стратегиялық қаруды сынауға ұлттық техникалық бақылау құралдары.
4.8 ИНТЕРФЕРОМЕТРЛЕР
Интерферометрлер – жұмысы кедергі құбылысына негізделген өлшеу құралдары.
Құрылғылардың жұмысы радиациялық сәуленің дәйекті ыдырауына (екі немесе одан да көп когерентті сәулелерге, олардың әрқайсысы әртүрлі оптикалық жолдар арқылы өтеді) және оларды кейіннен қосуға негізделген, нәтижесінде интерференциялық үлгі жасалады, одан арқалықтардың фазалық ығысуын анықтауға болады.
Интерферометрлер жұлдыздардың бұрыштық өлшемдерін және жұлдыздар арасындағы бұрыштық қашықтықты өлшеуге, газдар мен сұйықтықтардың сыну көрсеткіштерін өлшеуге, ауадағы қоспалардың концентрациясын анықтауға арналған. Интерферометрлер оптикалық бөлшектердің және олардың беттерінің сапасын бақылау үшін, металл беттерін өңдеудің тазалығын бақылау үшін қолданылады.
Интерферометрлердің жұмыс істеу принципі жарық интерференциясы құбылысына негізделгендіктен, құрылғылардың осы тобын зерттеуді осы құбылысты зерттеуден бастаймыз.
Жарық интерференциясы – бірнеше жарық толқындарының суперпозициясы (суперпозициясы) нәтижесінде жарық қарқындылығының қайта бөлінуі. Бұл құбылыс кеңістіктегі қарқындылықтың максимумдары мен минимумдарының ауыспалы болуымен бірге жүреді. Оның таралуы интерференциялық үлгі деп аталады.
Интерференция құбылысын алғаш рет тәуелсіз Роберт Бойл (1627-1691) және Роберт Гук (1635-1703) ашты. Олар су бетінде мұнай немесе бензин дақтарына ұқсас түрлі-түсті жұқа қабықшалардың (интерференциялық жиектер) пайда болуын байқады. 1801 жылы Томас Янг (1773-1829) «Суперпозиция принципін» енгізе отырып, бірінші болып жарықтың интерференциясы құбылысын түсіндірді және «интерференция» терминін енгізді (1803). Ол сондай-ақ жарықтың интерференциясын байқауға арналған бірінші демонстрациялық тәжірибені жасады, екі жарық көзінен интерференцияны алды (1802); Юнг тәжірибесі кейінірек классикаға айналды.
Сурет 141. Янг тәжірибесі және жұқа пленкадағы интерференциясы.
Жарық үшін тұрақты интерференциялық үлгіні алудың тағы бір әдісі толқынның екі бөлігінің жолындағы бірдей айырмашылыққа негізделген ауа саңылауларын пайдалану болып табылады: біреуі линзаның ішкі бетінен бірден шағылысып, екіншісі ауа саңылауы арқылы өтеді. оның астында және содан кейін ғана шағылысады. Оны дөңес жағын төмен қаратып шыны пластинкаға жазық-дөңес линзаны қою арқылы алуға болады. Линзаны жоғарыдан монохроматикалық жарықпен жарықтандырғанда, линза мен пластинаның жеткілікті жақын жанасу нүктесінде әртүрлі қарқындылықтағы ауыспалы күңгірт және ашық концентрлік сақиналармен қоршалған қараңғы нүкте пайда болады. Күңгірт сақиналар интерференциялық минимумдарға сәйкес келеді, ал ақшылдар максимумдарға сәйкес келеді, күңгірт және ашық сақиналар ауа саңылауының бірдей қалыңдықтағы изосызықтары болып табылады. Ашық немесе күңгірт сақинаның радиусын өлшеп, оның сериялық нөмірін ортасынан анықтау арқылы монохроматикалық жарықтың толқын ұзындығын анықтауға болады. Объективтің беті неғұрлым тік болса, әсіресе шеттеріне жақынырақ, іргелес жарық немесе қараңғы сақиналар арасындағы қашықтық соғұрлым аз болады. Бұл әдіс оптикалық бөлшектерді басқару үшін қолданылады.
142-сурет. Ньютон сақиналары
Интерференция құбылысын талдай келе, интерферометрлерді құру схемаларын қарастыруға көшейік.
Мишельсон интерферометрікедергі жасайтын толқындарды тудыратын объектілерді кеңістікте теңестіру мүмкін болмаған немесе қандай да бір себептермен қажет емес жағдайларда әртүрлі қолданбаларға арналған ең кең таралған скелеттік интерферометр схемаларының бірі болып табылады.
Сурет 143. Мишельсон интерферометрі
Мишельсон Стеллар интерферометрі- жұлдыздардың бұрыштық өлшемдерін және қос жұлдыздар арасындағы бұрыштық қашықтықты өлшеуге арналған интерферометр. Екі жұлдыз арасындағы бұрыштық қашықтық өте аз болса, телескопта олар бір жұлдыз болып көрінеді. Бұл жағдайда олар қос жұлдыздар туралы айтады және оларды жалғыз жұлдыздардан ажырату үшін арнайы бақылаулар жасалуы керек. Осы мақсатта жұлдыздар арасындағы бұрыштық қашықтықты анықтауға мүмкіндік беретін Мишельсон жұлдыздық интерферометрі қолданылады.
Сурет 143. Мишельсон жұлдызды интерферометрі
Алыстағы жұлдыздан түсетін жарық сәулелері М1 - М2 тегіс айналардан шағылысып, жеткілікті үлкен қашықтыққа D бөлінген, содан кейін басқа екі айнадан шағылысып, фокустық жазықтықта орналастырылған экрандағы линза арқылы жиналады. D қашықтықта орналасқан айналарды нүктелік көздер ретінде қарастыруға болады, олардың ара қашықтығы D-ге тең. Осының нәтижесінде жұлдыздың кескінінде D қашықтықта орналасқан екі саңылаудың интерференциясына ұқсас интерференциялық үлгі байқалады. бір-бірінен. Бұл суреттегі іргелес интерференция максимумдарының арасындағы бұрыштық қашықтық θ=λ/D-ге тең, мұндағы λ – жарық толқынының ұзындығы. Егер бір-бірінен φ аз бұрыштық қашықтықта орналасқан екі жақын жұлдыз болса, телескопта 2 интерференциялық заңдылық пайда болады, олар да φ бұрышымен ығысқан және бір-бірін жабады. θ және φ бұрыштарының қатынасына байланысты жалпы суреттің жолақтарының көрінуі әртүрлі болады. D арақашықтықты өзгерту және, демек, θ бұрышын өзгерту арқылы бір интерференциялық үлгінің максимумдарының екіншісінің минимумдарымен тіркесіміне қол жеткізуге болады, нәтижесінде шеттердің нашар көрінуі мүмкін. Бұл шарттарда φ=½θ=λ/2D. D өлшеп, λ біле отырып, φ жұлдыздарының арасындағы бұрыштық қашықтықты анықтауға болады. Бір жұлдыздың бұрыштық өлшемдері дәл осылай анықталады. Егер жұлдыз біркелкі жарқыраған диск ретінде қарастырылса, онда есептеу жолақтардың жоғалуы φ=1,22λ/D кезінде болатынын көрсетеді. D базасы неғұрлым үлкен болса, жұлдыздық интерферометрдің өлшеу дәлдігі соғұрлым жоғары болады, онда D 18 м жетуі мүмкін, бұл бұрыштық қашықтықты 0,001" дәлдікпен өлшеуге мүмкіндік береді. Бұрыштық өлшемді өлшеу үшін. Жарығы шу деңгейінде болатын өте әлсіз жұлдыздардың өлшемдері, Қарқындылық корреляция әдісі қолданылады.
Рождественский интерферометрі– бұл екі сәулелі интерферометр M1, M2 2 айнадан және екі параллельді мөлдір пластиналар P1, P2; M1, P1 және M2, P2 жұптары параллельді түрде орнатылады, бірақ M1 және M2 шағын бұрышта бір-біріне қатысты көлбеу; қашықтық M1P1 = M2P2 және M1P2=P1M2. Жарық сәулесі Р1 пластинасы арқылы 2 сәулеге бөлінеді, олар М1, М2-ден шағылысып, Р2 өткеннен кейін фазалар айырмашылығына параллель болып шығады.
δ = (4πD/λ)(cos i1 - cos i2).
Сурет 144. Рождественский интерферометрі
δ сәулелердің айналардағы орнына тәуелді емес және тек түсу бұрыштарымен анықталатындықтан, интерференциялық үлгі шексіздікте (немесе О линзасының фокустық жазықтығында) локализацияланған болады. Рождественский интерферометріне түскен сәулелердің параллель шоғы интерференциялық үлгідегі бір нүктеге сәйкес келеді, сондықтан бүкіл үлгіні бақылау үшін ақырғы апертураның сәулесі қажет. Үлгінің пайда болуы (жолақтардың реті мен ені, олардың бағыты) М1 және М2 айналарының еңісіне байланысты. Егер, мысалы, M1 және M2 түзетін екібұрышты бұрыштың шеті тік болса (сызбаға перпендикуляр), онда тіпті өте аз айырмашылықпен (i1-i2) салыстырмалы түрде жоғары ретті жолақтар (D үлкен) болады. тік және дерлік параллель болса, екібұрышты бұрыштың шеті көлденең болса, онда көру аймағында ақ жарықта көрінетін төменгі ретті көлденең жолақтар бар (нөлдік). к.-л бумаларының біріне кіріспе. мөлдір заттың, мысалы, пластина, жолақтардың енін, ретін және бағдарын өзгертеді: нөлдік жолақ көлденең емес және M1 және M2 кейбір аралық бағдарларында пайда болады; бұл пластинаның өте үлкен қалыңдығымен ақ жарықта, M1 және M2 арасындағы бұрыштың шеті дерлік тік болған кезде өте тар, дерлік тік жолақтар ғана көрінеді. Жолақтардың ені M1 және P1 арасындағы бұрышқа байланысты, ол азайған сайын артады. Егер барлық айналар мен пластиналар параллель болса, онда біртексіздіктер болмаған кезде жолақтардың ені шексіз болады (интерференция өрісі біркелкі жарықтандырылады).
Джамин интерферометр(интерференциялық рефрактометр) – газдар мен сұйықтықтардың сыну көрсеткіштерін өлшеуге, сондай-ақ ауадағы қоспалардың концентрациясын анықтауға арналған интерферометр.
Джамин интерферометрі бір-біріне дерлік параллель орнатылған екі бірдей қалың жазық-параллель шыны (немесе кварц) пластиналардан тұрады. Жарық шоғы бірінші пластинаға 45°-қа жақын i бұрышпен түседі. Сәуленің әрбір сәулесі пластина беттеріне шағылысқаннан кейін, пластиналардың қалыңдығына байланысты бір-бірінен белгілі бір қашықтықта таралатын S1 және S2 2 когерентті сәулелерге бөлінеді d. Содан кейін, екінші тақтайшада олардың әрқайсысы бірдей екі арқалыққа бөлінеді. Нәтижесінде екінші пластинадан 4 параллельді когерентті S1’, S1”, S2’, S2” сәулелері келеді; S1” және S2’ ортаңғы сәулелер қабаттастырылған және O1 линзасының фокустық жазықтығында интерференциялық үлгіні құрайды.
145-сурет. Джамин интерферометрінің диаграммасы: OO – компенсациялық пластинкалардың айналу осі; L – компенсатордың айналмалы дискі; O1 және O2 – телескоптың линзасы мен окуляры.
Олардың арасындағы айырмашылық тең
мұндағы n n - пластиналардың сыну көрсеткіші.
φ - олардың арасындағы бұрыш.
(φ ≈ 5′ - 15′ ∆) шамасында кішкентай, сондықтан ақ жарық көзін пайдаланған кезде ортасында ақ ахроматикалық жолағы бар түзу сызықтар түріндегі төменгі ретті интерференциялық жиектер ғана байқалады. түсті жолақтар жүйесі.).
S1 және S2 сәулелерінің арасындағы салыстырмалы үлкен қашықтық олардың жолында сыну көрсеткіштері n1 және n2 болатын зерттелетін заттармен бірдей ұзындықтағы l екі К1 және К2 кюветтерін орнатуға мүмкіндік береді. Алынған жол айырмашылығы кедергі үлгісінің ығысуын тудырады.
∆ = (n2-n1)l = δnl
Джамин интерферометрінің көмегімен газ қоспаларының сандық талдауы жүргізіледі – шахталардың ауасындағы метан және СО2 сияқты белгілі бір газ қоспаларының концентрациясы анықталады (өйткені n газдың табиғатына байланысты).
Интерферометр Физо-негізінен жалпақ оптикалық беттерді жасаудың дәлдігін бақылау үшін қолданылатын қарапайым интерферометрлердің бірі. егжей.
O1 конденсаторын, D диафрагмасын және объективті O2 көмегімен монохроматикалық L көзінен келетін жарық параллель сәуледе E сілтемесіне және басқарылатын K пластинкаларына (бірінің үстіне бірі орналасқан) олардың беттеріне дерлік перпендикуляр бағытталады. Бұл жағдайда пластиналардың қатаң тегіс тірек және басқарылатын беттері өздерінің арасында шағын бұрышты а құрайды. Мөлдір пластинаны Р пайдалана отырып, шағылысқан жарықта бірдей қалыңдықтағы интерференциялық жиектер байқалады, олар басқарылатын және тірек беттер арасындағы ауа сынасының аймағында локализацияланған.
146-сурет. Физо интерферометрі; a - Басқарылатын пластинадағы ақауларды жоғарыдан қарау; b - Анықтамалық және бақылау тақталарының көлденең қимасы. AA сызығы бойынша кесінді (а бұрышы мен ақаулардың өлшемі анық болу үшін үлкен үлкейтілген); c - Физо интерферометріндегі бірдей қалыңдықтағы жолақтардың интерференциялық үлгісінің көрінісі.
Бұл жолақтардың орналасуы шарт бойынша анықталады: D=2dn+l/2=ml=const (n~1 кезінде), мұндағы d – ауа сынасының қалыңдығы. Егер бақыланатын бет идеалды тегіс болса, онда тең көлбеу жолақтар сынаның шетіне параллель түзу тең қашықтықтағы сызықтар түрінде болады (d=const), олардың арасындағы қашықтық z=l/2a (сурет 2, в). ) (a=10 "" және l~0,5 мкм, z=5 мм кезінде). Басқарылатын бетінде кейбіреулер болса. ақаулар, мысалы, суреттегідей кішігірім ойыстар немесе шығыңқы жерлер немесе ол қатаң тегіс емес болса, онда бұл ақаулар орналасқан аймақта түзуліктен dz ауытқулар байқалады. Бұл жағдайда dz/z ауытқу шамасы dh=(l/2)dz/z қатынасы бойынша ақаудың биіктігіне немесе тереңдігіне dh байланысты.
Қарапайым көз dz/z~0,l мәнін бағалай алады, ол анықталған ақаудың мәніне сәйкес келеді dh=l/20 (l=0,633 мкм, dh=0,031 мкм). Ауытқу белгісі ақаудың түрін ажыратуға мүмкіндік береді: депрессия немесе шығу. Егер басқарылатын бет шар тәрізді болса, интерференциялық жиектер концентрлік шеңберлер пішініне ие болады (Ньютон сақиналарын қараңыз). Физо интерферометрінде басқарылатын және тірек тақталардың беттері бұрыштың кішігірімдігіне байланысты (доға секундтары) бір-біріне толығымен дерлік жанасады және реттеу процесі кезінде зақымдалуы мүмкін. Сондықтан беттерді басқару үшін жиі Микельсон интерферометрінің схемасы бойынша құрастырылған контактісіз интерферометрлер қолданылады.
147-сурет. Романов құрастырған Физо интерферометрі тегіс жылтыратылған беттер мен айналар пішінін жанаспастан өлшеуге арналған. Бағдарламалық құрал қосымша енгізілген қисайтулармен кедергі үлгілерін өңдеуге арналған.
Әдебиет.
- Д.Н.Черкасова, А.В.Бахолдин / «Оптикалық офтальмологиялық құрылғылар мен жүйелер I бөлім» / Санкт-Петербург 2010 ж.
- Лукин С.Б. / «ЭКО КУРС БОЙЫНША ДӘРІС ЖАЗМАЛАРЫ» / Санкт-Петербург мемлекеттік университеті ИТМО 2004 ж.
- Латыев С.М./ «Дәл (оптикалық) аспаптарды жобалау»/ «Оптикалық аспаптарды құрастыру негіздері» пәні бойынша электронды оқулық. SPbSU ITMO
- А.Л. Андреев / «Автоматтандырылған телебақылау жүйелері» / ИТМО Санкт-Петербург мемлекеттік университеті
- Митрофанов С.С./ «ОП құрылғысының теориялық және физикалық негіздері» / «Қолданбалы оптика» пәні бойынша электронды оқулық. Санкт-Петербург мемлекеттік университеті ITMO, КПОП бөлімі
- http://biggest.su/samyj-bolshoj-teleskop/
7. В.Самохин, Н.Терехова / «Бейнепроекция бүгін және ертең»
8. М.А. Кустикова, М.Н. Мешалкина, В.Л. Мусяков, А.Н. Тимофеев/ «ЭКОЛОГИЯЛЫҚ МОНИТОРИНГ» курсының «ОПТИКАЛЫҚ-ЭЛЕКТРОНДЫҚ ГАЗ АНАЛизаторлар» тарауындағы зертханалық жұмыстарды орындауға арналған әдістемелік нұсқаулар
10. http://www.krugosvet.ru/enc/nauka_i_tehnika/fizika/OPTIKA.html?page=4.6
11. Захарьевский А.Н. «Интерферометрлер» 1952 ж.
12. М.М. Мирошников / «ОЭҚ теориялық негіздері» / «Машина жасау» 1977 ж.
13. М.М. Русинов / «Оптикалық жүйелердің өлшемді есептеулері» Мәскеу 1963 ж
14. Г.Г. Ишанин, М.Г.Козлов, К.А. Томск / «Жарықтандыру техникасының негіздері» / Санкт-Петербург 2004 ж
Тұжырымдама ретінде лидар ондаған жылдар бойы болды. Дегенмен, соңғы жылдары бұл технологияға қызығушылық күрт өсті, өйткені сенсорлар кішірейіп, күрделірек болды, ал лидар технологиясы бар өнімдерді қолдану аясы кеңейді.
Лидар сөзі LIDAR сөзінің транслитерациясы (Light Detection and Ranging – жарықты анықтау және диапазон жүйесі). Бұл мөлдір және мөлдір ортада жарықтың шағылысу және шашырау құбылыстарын қолданатын белсенді оптикалық жүйелерді пайдалана отырып, алыстағы объектілер туралы ақпаратты алу және өңдеу технологиясы. Лидар құрылғы ретінде радарға ұқсайды, сондықтан оның қолданылуы бақылау және анықтау болып табылады, бірақ радар сияқты радиотолқындардың орнына ол көптеген жағдайларда лазермен жасалған жарықты пайдаланады. Лидар термині көбінесе лазерлік анықтау және диапазонды білдіретін ладар терминімен ауыстырылады, дегенмен Lockheed Martin компаниясының ғарыштық жүйелер бөлімінің бір бөлігі болып табылатын Coherent Technologies компаниясының зерттеу менеджері Джо Бактың айтуынша, екі ұғымның техникалық көзқарасы әртүрлі әртүрлі. «Жұмсақ зат деп санауға болатын нәрсеге, мысалы, ауадағы бөлшектер немесе аэрозольге қараған кезде, сарапшылар бұл нысандарды анықтау туралы сөйлескенде лидарды пайдаланады. Автокөлік немесе ағаш сияқты тығыз, қатты заттарды қараған кезде сіз ладар терминін қолданасыз ». Ғылыми тұрғыдан лидар туралы қосымша ақпарат алу үшін «Лидар: ол қалай жұмыс істейді» бөлімін қараңыз.
«Лидар 60-шы жылдардың басында енгізілгеннен бері көптеген ондаған жылдар бойы зерттеу нысаны болды», - деп жалғастырды Бак. Дегенмен, оған деген қызығушылық осы ғасырдың басынан бастап, ең алдымен, технологиялық прогреске байланысты айтарлықтай өсті. Ол синтетикалық диафрагмалық бейнелеудің мысалын келтірді. Телескоп неғұрлым үлкен болса, объектінің ажыратымдылығын соғұрлым жоғарырақ алуға болады. Егер сізге өте жоғары ажыратымдылық қажет болса, сізге әлдеқайда үлкен оптикалық жүйе қажет болуы мүмкін, ол практикалық тұрғыдан өте практикалық болмауы мүмкін. Синтетикалық апертура кескіні физикалық апертурадан әлдеқайда үлкен болуы мүмкін нақты апертураны шығару үшін қозғалатын платформа мен сигналды өңдеу арқылы бұл мәселені шешеді. Синтетикалық диафрагмалық радарлар (SAR) көптеген ондаған жылдар бойы қолданылып келеді. Дегенмен, 2000-шы жылдардың басында ғана синтетикалық диафрагмалық оптикалық бейнелеудің практикалық көрсетілімдері басталды, сол кезде лазерлер кеңінен қолданылғанына қарамастан. «Шындығында, реттеулердің кең ауқымында жеткілікті тұрақтылыққа ие болатын оптикалық көздерді әзірлеуге көп уақыт қажет болды... Материалдарды, жарық көздерін және детекторларды (лидарларда қолданылатын) жетілдіру жалғасуда. Енді сізде бұл өлшемдерді жасау мүмкіндігі ғана емес, оларды шағын бірліктерде орындау мүмкіндігі бар, бұл жүйелерді өлшем, салмақ және қуат тұтыну тұрғысынан практикалық етеді.

Локхид Мартиннің айтуынша, лидарға деген қызығушылық осы ғасырдың басында артты, әрине, технология жетістіктерінің арқасында. Суретте Lockheed Martin компаниясының WindTracer жүйесі Мюнхен әуежайын күзетеді
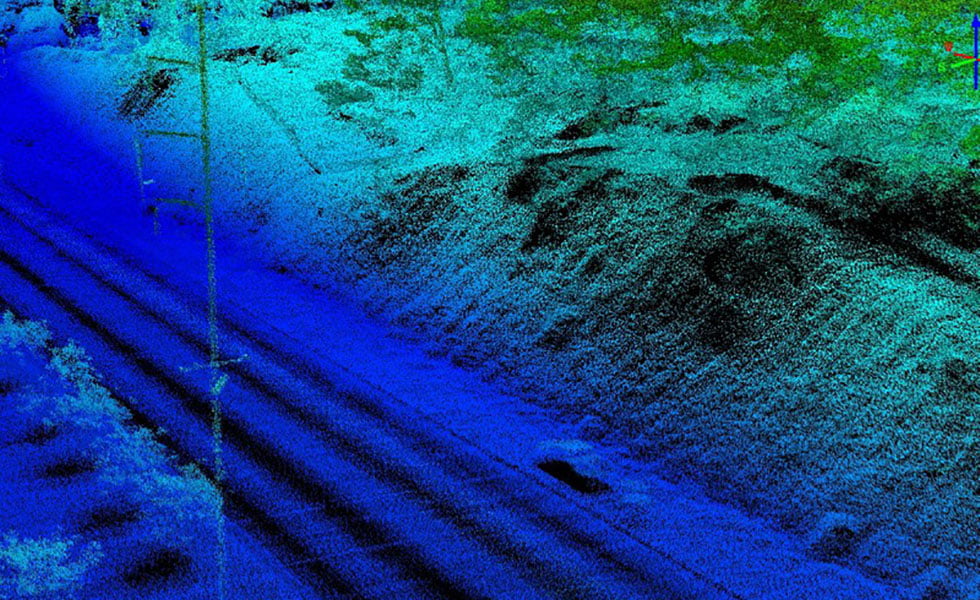
Сондай-ақ лидардан (немесе лидар жинаған ақпарат) деректерді жинау оңайырақ және практикалық болады. Дәстүрлі түрде ол ұшақ сенсорларынан жиналады, дейді BAE Systems геокеңістіктік пайдалану өнімдері тобының басшысы Ник Розенгартен. Дегенмен, бүгінгі күні сенсорларды жердегі көліктерге немесе тіпті адам деректерін жинауды қамтитын рюкзактарға орнатуға болады. «Бұл мүмкіндіктердің кең ауқымын ашады, деректерді енді үйде де, сыртта да жинауға болады», - деп түсіндірді Розенгартен. Мэт Моррис, Textron Systems геокеңістіктік шешімдерінің басшысы, «лидар - бұл шын мәнінде таңғажайып деректер жиынтығы, өйткені ол Жер бетінің егжей-тегжейлі мәліметтерін береді. Ол белгілі бір нүктелердегі жер бетінің биіктігіне қатысты ақпаратты беретін DTED (Digital Rain Elevation Data) технологиясына қарағанда әлдеқайда егжей-тегжейлі және, былайша айтқанда, нюансты суретті береді. Әскери тұтынушыларымыздан естіген ең күшті қолдану жағдайларының бірі - олар бейтаныс рельефке орналасу, өйткені олар қайда баратындарын білуі керек... төбеге шығу немесе дуалдан асып кету. DTED деректері мұны көруге мүмкіндік бермейді. Сіз тіпті ғимараттарды көрмейсіз ».
Моррис тіпті рельефтік нүктелер үшін кейбір дәстүрлі жоғары ажыратымдылықтағы биіктік деректері бұл мүмкіндіктерді көруге мүмкіндік бермейтінін атап өтті. Бірақ lidar мұны «позиция қадамы» - деректер жинағында дәл көрсетуге болатын позициялар арасындағы қашықтықты сипаттайтын терминнің арқасында жасауға мүмкіндік береді. Лидар жағдайында «позиция қадамын» сантиметрге дейін азайтуға болады, «сондықтан сіз ғимараттың төбесінің биіктігін немесе қабырғаның биіктігін немесе ағаштың биіктігін дәл біле аласыз. Бұл шын мәнінде үш өлшемді (3D) ситуациялық хабардар болу деңгейін арттырады. Сонымен қатар, лидар датчиктерінің құны да, көлемі де төмендеп, оларды қолжетімді етеді. «Он жыл бұрын лидар сенсорлық жүйелері өте үлкен және өте қымбат болды. Олардың қуатты тұтынуы жоғары болды. Бірақ олар дамып, технологиялар жетілдірілді, платформалар айтарлықтай кішірейді, энергия тұтыну азайды және олар жасаған деректердің сапасы артты ».

Textron компаниясының Lidar Analyst бағдарламалық құралы арқылы жасалған қалалық пейзаж. Ол жер бедерін зерттеуге, 3D пейзаждарын шығаруға және 3D визуализация бағдарламаларында ақпаратты көрсетуге мүмкіндік береді

BAE Systems компаниясының SOCET GXP қолданбасы арқылы түсірілген лидар кескіндерінің сериясы. Мозаика (дәйекті суреттерді жинау) лидар деректерінде оның қалай алынғанына қарамастан орындалуы мүмкін.
Моррис әскери салада лидарды негізгі пайдалану 3D жоспарлау және жауынгерлік жаттығулар екенін айтты. Мысалы, оның компаниясының ұшу шарттарын имитациялауға арналған Lidar Analyst өнімі пайдаланушыларға деректердің үлкен көлемін алуға және «осы 3D модельдерін жылдам жасауға мүмкіндік береді, содан кейін олар өз миссияларын өте дәл жоспарлай алады». Бұл жердегі операцияларға да қатысты. Моррис түсіндірді: «Біздің өнім мақсатты аймаққа кіру және шығу жолдарын жоспарлау үшін пайдаланылады және бастапқы деректер жоғары ажыратымдылықта болғандықтан, ол өте дәл көру сызығын талдауды қамтамасыз ете алады».
Lidar Analyst компаниясымен бірге Textron RemoteView, кескінді талдау бағдарламалық өнімін әзірледі, оның тұтынушылары АҚШ әскери және барлау агенттіктерін қамтиды. RemoteView бағдарламалық құралы әртүрлі деректер көздерін, соның ішінде lidar деректерін пайдалана алады. BAE Systems сонымен қатар геокеңістіктік талдау бағдарламалық құралын ұсынады, оның флагмандық өнімі SOCET GXP болып табылады, ол әртүрлі мүмкіндіктерді, соның ішінде lidar деректерін пайдалануды қамтамасыз етеді. Сонымен қатар, Rosengarten түсіндірді, компания деректерді басқару қолданбасы болып табылатын GXP Xplorer технологиясын әзірледі. Бұл технологиялар әскери қолдану үшін өте қолайлы. Мысалы, Розенгартен SOCET GXP бағдарламалық құралының бөлігі болып табылатын тікұшақтың қону аймағын есептеу құралын атап өтті. «Ол lidar деректерін ала алады және пайдаланушыларға тікұшақты қондыру үшін жеткілікті болуы мүмкін жердегі аймақтар туралы ақпарат бере алады». Мысалы, ол оларға жолда ағаштар сияқты тік кедергілердің бар-жоғын айта алады: «Адамдар гуманитарлық дағдарыстар кезінде эвакуация нүктесі ретінде ең қолайлы аймақтарды анықтау үшін бұл құралды пайдалана алады». Розенгартен сонымен қатар белгілі бір аумақтан бірнеше лидар деректер жинағы жиналып, бір-біріне «тігілген» «теселляция» техникасының әлеуетін атап өтті. Бұл BAE Systems компаниясының SOCET GXP қолданбасы сияқты бағдарламалық қамтамасыз етумен біріктірілген кезде «lidar сенсоры метадеректерінің жоғары дәлдігінің арқасында мүмкін болды, ол метадеректерді геокеңістіктік деректер арқылы есептелген жердегі нақты аймақтарға айналдыра алады. Процесс лидар деректеріне негізделген және деректердің қалай жиналатынына тәуелсіз».

Lockheed Martin өзінің WindTracer технологиясы үшін ықтимал әскери қолданбаларды көреді. Бұл әуежайларда желдің ығысуын өлшеу үшін лидар қолданатын коммерциялық өнім. Ұқсас технологияны әуе тамшыларының дәлдігін жақсарту үшін әскери салада қолдануға болады. Суретте Дубай әуежайындағы WindTracer жүйесі
Бұл қалай жұмыс істейді: лидар
Лидар нысананы жарықпен жарықтандыру арқылы жұмыс істейді. Лидар көрінетін, ультракүлгін немесе жақын инфрақызыл сәулелерді пайдалана алады. Лидардың жұмыс принципі қарапайым. Нысан (бет) қысқа жарық импульсімен жарықтандырылады және сигнал көзіне қайтып келгеннен кейін уақыт өлшенеді. Лидар секундына 150 000 импульсқа дейінгі жылдамдықпен объектіге (бетке) лазер сәулесінің жылдам, қысқа импульстерін шығарады. Құрылғыдағы сенсор 299 792 км/с тең жарықтың тұрақты жылдамдығы негізінде жарық импульсінің берілуі мен оның шағылысу арасындағы уақыт аралығын өлшейді. Осы уақыт аралығын өлшей отырып, сіз лидар мен объектінің жеке бөлігі арасындағы қашықтықты есептей аласыз, демек, оның лидарға қатысты орналасуына негізделген объектінің бейнесін құра аласыз.
Жел ығысу
Сонымен қатар, Бак мырза Lockheed Martin компаниясының WindTracer технологиясының ықтимал әскери қосымшаларына назар аударды. Коммерциялық WindTracer технологиясы әуежайлардағы желдің ығысуын өлшеу үшін лидарды пайдаланады. Дәл осындай процесті әскери салада да қолдануға болады, мысалы, дәл ұшқыштар үшін. «Сізге керек-жарақтарды жеткілікті биіктіктен тастау керек, сондықтан сіз оларды паллеттерге салып, парашюттен тастайсыз. Енді олар қайда қонатынын көрейік? Сіз олардың қайда баратынын болжауға тырысуға болады, бірақ мәселе төмендегенде, желдің ығысуы әртүрлі биіктікте бағытын өзгертеді », - деп түсіндірді ол. - Ал содан кейін паллет қайда түсетінін қалай болжауға болады? Егер сіз желді өлшей алсаңыз және траекторияны оңтайландыра алсаңыз, онда сіз жабдықты өте жоғары дәлдікпен жеткізе аласыз.
Лидар жердегі ұшқышсыз көліктерде де қолданылады. Мысалы, роботты жерүсті көлік (AHA) өндірушісі Roboteam Top Layer деп аталатын құрал жасады. Бұл lidar қолданатын 3D картасы және автономды навигация технологиясы. Top Layer лидарды екі жолмен пайдаланады, дейді Roboteam бас директоры Шахар Абухазира. Біріншісі нақты уақытта жабық кеңістіктерді картаға түсіруге мүмкіндік береді. «Кейде жер асты орталарында бейне жеткіліксіз, мысалы, ол тым қараңғы болуы мүмкін немесе шаң немесе түтіннің әсерінен көріну төмендеуі мүмкін», - деп қосты Абухазира. «Лидардың мүмкіндіктері нөлдік бағдармен және айналаңызды түсінетін жағдайдан кетуге мүмкіндік береді... ол қазір бөлмені картаға түсіреді, туннельді картаға түсіреді. Сіз ештеңе көрмесеңіз де, қайда екеніңізді білмесеңіз де, жағдайды бірден түсіне аласыз».
Лидардың екінші қолданылуы оның автономиясында, операторға кез келген уақытта бірнеше жүйені бақылауға көмектеседі. «Бір оператор бір AHA-ны басқара алады, бірақ адам басқаратын құрылғыны бақылайтын және оны автоматты түрде бақылайтын тағы екі AHA бар», - деп түсіндірді ол. Сол сияқты, сарбаз бөлмеге кіре алады және ANA оның артынан жүреді, яғни көлікті басқару үшін шетке шығудың қажеті жоқ. «Бұл операцияны қарапайым және интуитивті етеді». Roboteam-тің үлкенірек AHA Probot бортында лидар бар, ол ұзақ қашықтыққа жүруге көмектеседі. «Сіз оператордан үш күн қатарынан түймені басуын талап ете алмайсыз... сіз лидар сенсорын жай ғана сарбаздарды қадағалап отыру немесе көлікті бақылап отыру немесе тіпті бір нүктеден екінші нүктеге автоматты түрде жылжыту үшін пайдаланасыз. кедергілерден аулақ болуға көмектеседі». Абухазира болашақта бұл салада үлкен жетістіктер күтеді. Мысалы, пайдаланушылар адам мен ANA екі сарбаз сияқты әрекеттесетін жағдайды қалайды. «Сендер бір-біріңді бақыламайсыңдар. Сіз бір-біріңізге қарап, бір-біріңізге қоңырау шалып, дәл солай әрекет етесіз. Мен белгілі бір мағынада біз адамдар мен жүйелер арасындағы байланыстың осы деңгейіне жететінімізге сенемін. Бұл тиімдірек болады. Лидар бізді осы бағытта жетелейді деп ойлаймын ».

Roboteam компаниясының TopLayer бағдарламалық құралы AHA-ға нақты уақытта жабық кеңістіктерді картаға түсіруге мүмкіндік береді. Кейде бұл жағдайларда бейне жазу жеткіліксіз: ол қараңғы болуы мүмкін немесе шаң мен түтіннің әсерінен көріну жеткіліксіз болуы мүмкін.
Жер астына барайық
Абухазира сонымен қатар лидар сенсорлары қауіпті жер асты орталарында жұмыстарды жақсартады деп үміттенеді. Лидар сенсорлары туннельдерді картаға түсіру арқылы қосымша ақпарат береді. Сонымен қатар, ол кейде шағын және қараңғы туннельде оператор AHA дұрыс емес бағытта келе жатқанын түсінбеуі мүмкін екенін атап өтті. «Lidar сенсорлары нақты уақыттағы GPS сияқты жұмыс істейді және процесті бейне ойын сияқты сезінеді. Сіз туннельде жүйеңізді көре аласыз, нақты уақытта қайда бара жатқаныңызды білесіз ».
Айта кету керек, лидар сенсорлары басқа деректер көзі болып табылады және оларды радарды тікелей ауыстыру деп санауға болмайды. Бак екі технологияның толқын ұзындығында үлкен айырмашылықтар бар екенін, олардың өзіндік артықшылықтары мен кемшіліктері бар екенін атап өтті. Көбінесе ең жақсы шешім екі технологияны қолдану болып табылады, мысалы, аэрозольді бұлт арқылы желді өлшеу. Оптикалық сенсорлардың қысқа толқын ұзындығы РЖ сенсорларының (радар) ұзағырақ толқын ұзындығымен салыстырғанда жақсырақ бағытты анықтауды қамтамасыз етеді. Дегенмен, сенсорлардың екі түрі үшін атмосфералық беріліс қасиеттері өте ерекшеленеді. «Радар бұлттардың белгілі бір түрлеріне ене алады, бұл лидармен күресу қиынға соғады. Бірақ, мысалы, тұманда лидар радарға қарағанда жақсырақ жұмыс істей алады.
Розенгартеннің айтуынша, лидарды басқа жарық көздерімен, мысалы, панхроматикалық деректермен біріктіру (кескін жарық толқындарының кең ауқымын пайдалана отырып жасалған) зерттелетін аумақтың толық бейнесін береді. Мұнда тікұшақтың қону алаңын анықтау жақсы мысал болып табылады. Лидар аумақты сканерлеп, оның көлге қарап тұрғанын ескерместен оның нөлдік еңісі бар деп айта алады. Ақпараттың бұл түрін басқа жарық көздерін пайдалану арқылы алуға болады. Розенгартен бұл сала сайып келгенде визуалды және басқа да жеңіл деректердің әртүрлі көздерін біріктіретін технологияларды біріктіруге бағытталған деп санайды. «Ол барлық деректерді бір қолшатырдың астына жинаудың жолдарын табады... Дәл және жан-жақты ақпарат алу тек lidar деректерін пайдалану емес, барлық қолжетімді технологияларды қамтитын күрделі тапсырма».
Сайттарға негізделген:
www.nationaldefensemagazine.org
www.lockheedmartin.com
www.baesystems.com
www.textron.com
www.robo-team.com
www.robotshop.com
www.Geo-Plus.com
www.nplus1.ru